ROS implementation of a dynamic obstacle avoidance algorithm trained with Deep RL

M. Everett, Y. Chen, and J. P. How, "Motion Planning Among Dynamic, Decision-Making Agents with Deep Reinforcement Learning", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
Paper: https://arxiv.org/abs/1805.01956 Video: https://www.youtube.com/watch?v=XHoXkWLhwYQ
Bibtex:
@inproceedings{Everett18_IROS,
address = {Madrid, Spain},
author = {Everett, Michael and Chen, Yu Fan and How, Jonathan P.},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
date-modified = {2018-10-03 06:18:08 -0400},
month = sep,
title = {Motion Planning Among Dynamic, Decision-Making Agents with Deep Reinforcement Learning},
year = {2018},
url = {https://arxiv.org/pdf/1805.01956.pdf},
bdsk-url-1 = {https://arxiv.org/pdf/1805.01956.pdf}
}
-
TensorFlow is required (tested with version 1.4.0)
-
numpy is required
-
ROS is optional (tested with Kinetic on Ubuntu 16.04)
-
ford_msgs if you're using ROS, for our custom msg definitions.
The main contribution of this software is the network.py file and trained model parameters (TensorFlow checkpoints).
Those contain the policy as reported in our paper and enables other reasearchers to easily compare future algorithms.
To make it easy to understand the flow of the code, we provide an example in scripts/ga3c_cadrl_demo.ipynb, in the form of a Jupyter notebook. This can be used just as a reference, but if you want to edit the file, make sure Jupyter is installed in your tensorflow virtualenv to be sure it will work.
This assumes you have nvidia-docker installed already. Might work with regular docker with minor changes.
git clone [email protected]/mfe7/cadrl_ros
./cadrl_ros/docker/build_docker.sh
./cadrl_ros/docker/run_docker.sh
That will start an instance of the docker container, and output a Jupyter notebook URL. Copy the URL into a browser, navigate to cadrl_ros/scripts and open ga3c_cadrl_demo.ipynb.
Tensorflow and other deps are already installed in the docker container you just built, so the notebook should "just work."
We also provide a ROS implementation that we tested on a Clearpath Jackal ground robot.
This node is just one module of the software required for autonomous navigation among dynamic obstacles, and much of it is written as to integrate with our system.
The ROS node as written may not be particularly useful for other systems, but should provide an example of how one might connect the modules to test our learned collision avoidance policy on hardware.
For example, other systems likely have different representation formats for dynamic obstacles as extracted from their perception system, but it should be straightforward to just replace our cbClusters method with another one, as long as the same information makes it into the state vector when the policy is queried.
We recommend looking at the Jupyter notebook first.
The algorithm was trained with goals set to be <10m from the agent's start position, so it would be necessary to provide this system with local subgoals if it were to be tested in a long journey. For short distances, say in an open atrium, this is probably not necessary.
Clone and build this repo and its dependency (assume destination is ~/catkin_ws/src)
cd ~/catkin_ws/src
git clone [email protected]/mfe7/cadrl_ros
git clone [email protected]:acl-swarm/ford_msgs.git -b dev
cd ~/catkin_ws && catkin_make
Connect inputs/outputs of your system to launch/cadrl_node.launch
-
~pose [geometry_msgs/PoseStamped] Robot's pose in the global frame
-
~velocity [geometry_msgs/Vector3] Robot's linear velocity in the global frame (vx, vy)
-
~goal [geometry_msgs/PoseStamped] Robot's goal position in the global frame
-
~clusters [ford_msgs/Clusters] Positions, velocities, sizes of other agents in vicinity
-
TODO: planner_mode, safe_actions, peds
-
~nn_cmd_vel [geometry_msgs/Twist] Robot's commanded twist (linear, angular speed) according to network's output
-
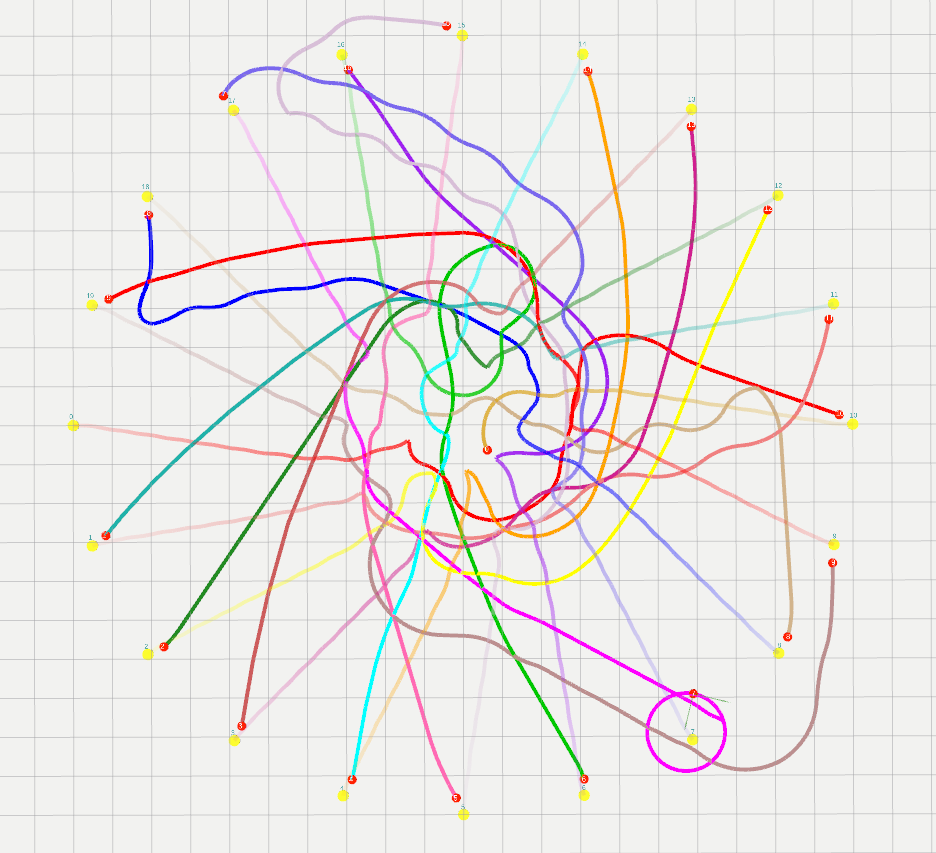
The other published topics are just markers for visualization
- ~pose_marker shows yellow rectangle at position according to ~pose
- ~path_marker shows red trajectory according to history of ~pose
- ~goal_path_marker shows blue arrow pointing toward position of commanded velocity 1 second into future
- ~agent_markers shows orange cylinders at the positions/sizes of nearby agents
-
TODO: remove other_agents_marker, other_vels
- ~jackal_speed Robot's preferred speed (m/s) - tested below 1.2m/s (and trained to be optimized near this speed)
As mentioned in the paper, we provide a few datasets that might be useful to researchers hoping to train NNs for collision avoidance. Please find the files in this Dropbox folder, along with instructions for use.
The test cases used in the paper are posted in this Dropbox folder. These contain initial positions, goal positions, preferred speed, radius settings for each test case, and are separated by number of agents. They were randomly generated in a way to produce reasonably interesting scenarios to evaluate the algorithms, but since they are random, some may be really easy or boring.
Michael Everett (https://github.com/mfe7)






























































































































{kind=link}