The turtlebot stack provides all the basic drivers for running and using a TurtleBot with ROS.
ROS Wiki : (http://www.ros.org/wiki/Robots/TurtleBot)
Launchers for Gazebo simulation of the TurtleBot
Home Page: http://www.ros.org/wiki/turtlebot_simulator
The turtlebot stack provides all the basic drivers for running and using a TurtleBot with ROS.
ROS Wiki : (http://www.ros.org/wiki/Robots/TurtleBot)








































































































































Hi,
I'm trying to add moving obstacles to the "turtlebot_stage". According to the tutorial (http://wiki.ros.org/turtlebot_stage/Tutorials/indigo/Customizing%20the%20Stage%20Simulator), moveable objects can be added to the map.
I tried to add velocity definition to the "myBlock.inc" and "maze.world" files, and I also referred to the model file definition (http://wiki.ros.org/turtlebot_stage/Tutorials/indigo/Customizing%20the%20Stage%20Simulator). But the obstacle only moves when it is dragged by the mouse. It doesn't move by itself.
Is it possible to add moving obstacles to the "turtlebot_stage"?
If so, what should I do?
I really appreciate your help. Thanks a lot!
Hi i'm trying to compile the indigo branch, but for some reason catkin doesn't even seem to try compiling turtlebot_simulator. When I do catkin_make --force-cmake, i do see turtlebot_simulator in the "traversing .. packages" list, however the package is not found when i try to roscd, or try to tab complete with catkin_make --pkg
Any ideas what to try?
Do something similar to amcl/gmapping demos on turtlebot_navigation and update wiki tutorials
The current version of turtlebot_stage available from debs is broken due to changes in the path to amcl. Looks like these bugs were already fixed in the from source code, but is still broken in the release version. A re-release should fix this.
For the turtlebot_dashboard it would be nice to have diagnostics output.
I'm sure it's in someone's todo list, and sorry if it's already WIP, but I open a ticket just because I didn't see it on buildfarm's status page.
There is one in the Turtlebot1 description. Shall we do the same for Turtlebot2?
_create.launch
_kobuki.launch
In the maze.world file it says 0.02 and in the maze.yaml it says 0.05.
My guess is that the resolution in the world file actually doesn't matter (as far as I remember the resolution is calculated from the size given in the map file, as I wrote here)
In that launch file we start some nodelets, but no manager. Those nodelets usually get load into openni's nodelet manager. Since this is not the case when simulating turtlebot, I added an extra nodelet manager.
Do I miss something here? If not, I would add this nodelet manager to the create launch files as well.
... to seperate create-specfic files from turtlebot ones.
This is just a heads up. For now we're removing turtlebot_simulator from the deb releases - it is not officially supported (there are a couple of blocks) and costing us time to keep an eye on the debs on the build farm.
If you're wanting to workaround the issues, feel free to play with the sources.
If the status quo should magically change, we'll update back here.
I'm using ROS Indigo on Ubuntu 14.04.
Whenever I reset the simulation on Gazebo (Edit - Reset World), all the movement stops and I've to relaunch the simulation on turtlebot_gazebo package again.
Is there a way to reset the simulation properly without relaunching it?
Mentioned here: http://answers.gazebosim.org/question/4399/turtlebot_gazebo-world-not-loading-models/
And already ticketed for Kobuki simulation here: yujinrobot/kobuki_desktop#21
I'm trying to drive the turtlebot in Gazebo. I've done this quite a few times, but now isn't working for some reason. I've done it before on Indigo, but struggling on Kinetic.
My installation procedure:
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install gazebo7
sudo apt-get install libgazebo7-*
Now I try to run gazebo
roslaunch turtlebot_gazebo turtlebot_world.launchroslaunch turtlebot_teleop keyboard_teleop.launchNow I send teleop commands but see no movement. So I check the topics and see if there is any movement:
/turtlebot_node/cmd_vel is responding to my teleop commands, the x velocity smoothly accelerates from 0.0 to 0.2 as expected./cmd_vel_mux/input/teleop does the same. With both of these I believe that turtlebot should now be moving.Here's my rqt_graph

Here's my frames
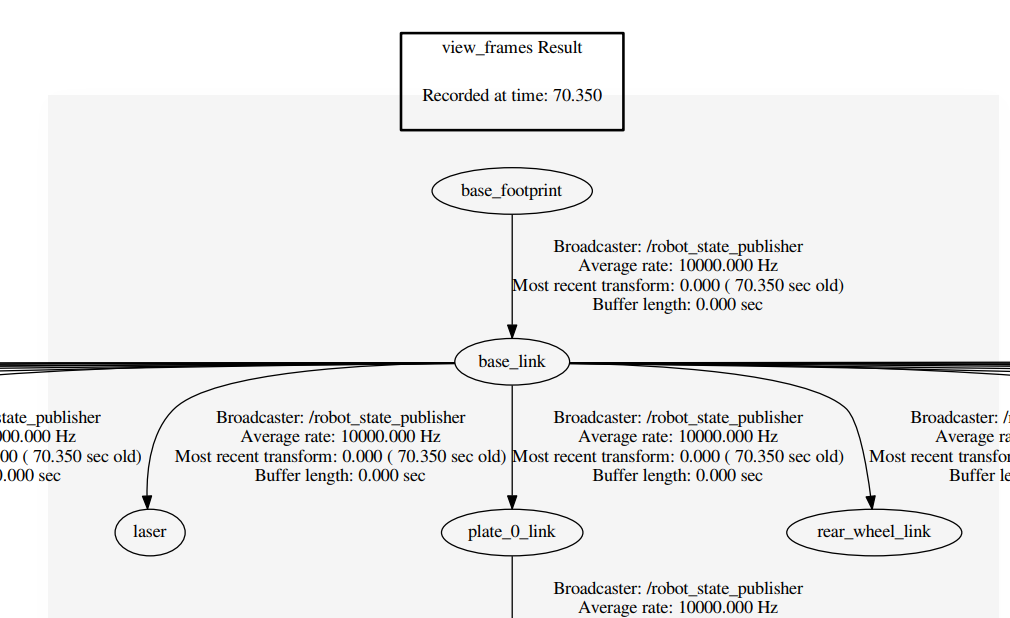
Notice that there is no /map frame.
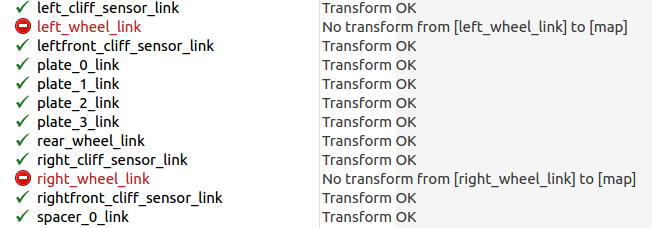
When I open rviz I see
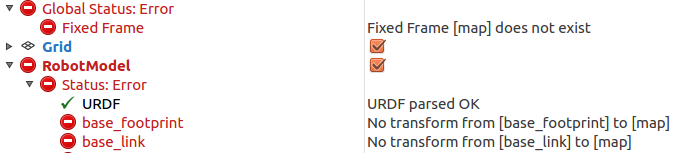
and this continues for every frame. So I add a static transform to try to fix this.
rosrun tf static_tf_publisher 0 0 0 0 0 0 map base_footprint 100
Now that error goes away but there's weirdness. The wheels still don't have the correct transformation?
So that's essentially where I am. The tfs aren't working by default. I've tried uninstalling, reinstalling, using different installation instructions on fresh partitions but I keep running into this unmoving turtlebot. Any help would be appreciated.
So rviz camera follows robot.
jihoonl@whoola:/opt/ros/indigo/share/turtlebot_stdr/launch$ roslaunch turtlebot_stdr turtlebot_in_stdr.launch --screen
... logging to /home/jihoonl/.ros/log/c1f702fa-cddb-11e4-9ff5-3085a9948f5e/roslaunch-whoola-20955.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://whoola:56301/
SUMMARY
========
PARAMETERS
* /amcl/base_frame_id: robot0
* /amcl/global_frame_id: world
* /amcl/gui_publish_rate: 10.0
* /amcl/initial_pose_a: 0.0
* /amcl/initial_pose_x: 2.0
* /amcl/initial_pose_y: 2.0
* /amcl/kld_err: 0.05
* /amcl/kld_z: 0.99
* /amcl/laser_lambda_short: 0.1
* /amcl/laser_likelihood_max_dist: 2.0
* /amcl/laser_max_beams: 60
* /amcl/laser_max_range: 12.0
* /amcl/laser_model_type: likelihood_field
* /amcl/laser_sigma_hit: 0.2
* /amcl/laser_z_hit: 0.5
* /amcl/laser_z_max: 0.05
* /amcl/laser_z_rand: 0.5
* /amcl/laser_z_short: 0.05
* /amcl/max_particles: 2000
* /amcl/min_particles: 500
* /amcl/odom_alpha1: 0.2
* /amcl/odom_alpha2: 0.2
* /amcl/odom_alpha3: 0.2
* /amcl/odom_alpha4: 0.2
* /amcl/odom_alpha5: 0.1
* /amcl/odom_frame_id: map
* /amcl/odom_model_type: diff
* /amcl/recovery_alpha_fast: 0.0
* /amcl/recovery_alpha_slow: 0.0
* /amcl/resample_interval: 1
* /amcl/transform_tolerance: 1.0
* /amcl/update_min_a: 0.2
* /amcl/update_min_d: 0.25
* /amcl/use_map_topic: True
* /cmd_vel_mux/yaml_cfg_file: /opt/ros/indigo/s...
* /diagnostic_aggregator/analyzers/input_ports/contains: ['Digital Input',...
* /diagnostic_aggregator/analyzers/input_ports/path: Input Ports
* /diagnostic_aggregator/analyzers/input_ports/remove_prefix: mobile_base_nodel...
* /diagnostic_aggregator/analyzers/input_ports/timeout: 5.0
* /diagnostic_aggregator/analyzers/input_ports/type: diagnostic_aggreg...
* /diagnostic_aggregator/analyzers/kobuki/contains: ['Watchdog', 'Mot...
* /diagnostic_aggregator/analyzers/kobuki/path: Kobuki
* /diagnostic_aggregator/analyzers/kobuki/remove_prefix: mobile_base_nodel...
* /diagnostic_aggregator/analyzers/kobuki/timeout: 5.0
* /diagnostic_aggregator/analyzers/kobuki/type: diagnostic_aggreg...
* /diagnostic_aggregator/analyzers/power/contains: ['Battery', 'Lapt...
* /diagnostic_aggregator/analyzers/power/path: Power System
* /diagnostic_aggregator/analyzers/power/remove_prefix: mobile_base_nodel...
* /diagnostic_aggregator/analyzers/power/timeout: 5.0
* /diagnostic_aggregator/analyzers/power/type: diagnostic_aggreg...
* /diagnostic_aggregator/analyzers/sensors/contains: ['Cliff Sensor', ...
* /diagnostic_aggregator/analyzers/sensors/path: Sensors
* /diagnostic_aggregator/analyzers/sensors/remove_prefix: mobile_base_nodel...
* /diagnostic_aggregator/analyzers/sensors/timeout: 5.0
* /diagnostic_aggregator/analyzers/sensors/type: diagnostic_aggreg...
* /diagnostic_aggregator/base_path:
* /diagnostic_aggregator/pub_rate: 1.0
* /joint_state_publisher/use_gui: True
* /map_server/frame_id: world
* /move_base/DWAPlannerROS/acc_lim_theta: 2.0
* /move_base/DWAPlannerROS/acc_lim_x: 1.0
* /move_base/DWAPlannerROS/acc_lim_y: 0.0
* /move_base/DWAPlannerROS/forward_point_distance: 0.325
* /move_base/DWAPlannerROS/global_frame_id: map
* /move_base/DWAPlannerROS/goal_distance_bias: 24.0
* /move_base/DWAPlannerROS/max_rot_vel: 5.0
* /move_base/DWAPlannerROS/max_scaling_factor: 0.2
* /move_base/DWAPlannerROS/max_trans_vel: 0.5
* /move_base/DWAPlannerROS/max_vel_x: 0.5
* /move_base/DWAPlannerROS/max_vel_y: 0.0
* /move_base/DWAPlannerROS/min_rot_vel: 0.4
* /move_base/DWAPlannerROS/min_trans_vel: 0.1
* /move_base/DWAPlannerROS/min_vel_x: 0.0
* /move_base/DWAPlannerROS/min_vel_y: 0.0
* /move_base/DWAPlannerROS/occdist_scale: 0.5
* /move_base/DWAPlannerROS/oscillation_reset_dist: 0.05
* /move_base/DWAPlannerROS/path_distance_bias: 64.0
* /move_base/DWAPlannerROS/publish_cost_grid_pc: True
* /move_base/DWAPlannerROS/publish_traj_pc: True
* /move_base/DWAPlannerROS/rot_stopped_vel: 0.4
* /move_base/DWAPlannerROS/scaling_speed: 0.25
* /move_base/DWAPlannerROS/sim_time: 1.0
* /move_base/DWAPlannerROS/stop_time_buffer: 0.2
* /move_base/DWAPlannerROS/trans_stopped_vel: 0.1
* /move_base/DWAPlannerROS/vtheta_samples: 20
* /move_base/DWAPlannerROS/vx_samples: 6
* /move_base/DWAPlannerROS/vy_samples: 1
* /move_base/DWAPlannerROS/xy_goal_tolerance: 0.15
* /move_base/DWAPlannerROS/yaw_goal_tolerance: 0.3
* /move_base/GlobalPlanner/allow_unknown: True
* /move_base/GlobalPlanner/cost_factor: 3.0
* /move_base/GlobalPlanner/default_tolerance: 0.0
* /move_base/GlobalPlanner/lethal_cost: 253
* /move_base/GlobalPlanner/neutral_cost: 50
* /move_base/GlobalPlanner/old_navfn_behavior: False
* /move_base/GlobalPlanner/planner_costmap_publish_frequency: 0.0
* /move_base/GlobalPlanner/planner_window_x: 0.0
* /move_base/GlobalPlanner/planner_window_y: 0.0
* /move_base/GlobalPlanner/publish_potential: True
* /move_base/GlobalPlanner/publish_scale: 100
* /move_base/GlobalPlanner/use_dijkstra: True
* /move_base/GlobalPlanner/use_grid_path: False
* /move_base/GlobalPlanner/use_quadratic: True
* /move_base/NavfnROS/allow_unknown: False
* /move_base/NavfnROS/default_tolerance: 0.0
* /move_base/NavfnROS/planner_window_x: 0.0
* /move_base/NavfnROS/planner_window_y: 0.0
* /move_base/NavfnROS/visualize_potential: False
* /move_base/base_global_planner: navfn/NavfnROS
* /move_base/base_local_planner: dwa_local_planner...
* /move_base/controller_frequency: 5.0
* /move_base/controller_patience: 3.0
* /move_base/global_costmap/global_frame: world
* /move_base/global_costmap/inflation_layer/cost_scaling_factor: 5.0
* /move_base/global_costmap/inflation_layer/enabled: True
* /move_base/global_costmap/inflation_layer/inflation_radius: 0.5
* /move_base/global_costmap/map_type: voxel
* /move_base/global_costmap/max_obstacle_height: 0.6
* /move_base/global_costmap/obstacle_layer/bump/clearing: False
* /move_base/global_costmap/obstacle_layer/bump/data_type: PointCloud2
* /move_base/global_costmap/obstacle_layer/bump/marking: True
* /move_base/global_costmap/obstacle_layer/bump/max_obstacle_height: 0.15
* /move_base/global_costmap/obstacle_layer/bump/min_obstacle_height: 0.0
* /move_base/global_costmap/obstacle_layer/bump/topic: mobile_base/senso...
* /move_base/global_costmap/obstacle_layer/combination_method: 1
* /move_base/global_costmap/obstacle_layer/enabled: True
* /move_base/global_costmap/obstacle_layer/mark_threshold: 0
* /move_base/global_costmap/obstacle_layer/max_obstacle_height: 0.6
* /move_base/global_costmap/obstacle_layer/observation_sources: scan bump
* /move_base/global_costmap/obstacle_layer/obstacle_range: 2.5
* /move_base/global_costmap/obstacle_layer/origin_z: 0.0
* /move_base/global_costmap/obstacle_layer/publish_voxel_map: False
* /move_base/global_costmap/obstacle_layer/raytrace_range: 3.0
* /move_base/global_costmap/obstacle_layer/scan/clearing: True
* /move_base/global_costmap/obstacle_layer/scan/data_type: LaserScan
* /move_base/global_costmap/obstacle_layer/scan/marking: True
* /move_base/global_costmap/obstacle_layer/scan/max_obstacle_height: 5.0
* /move_base/global_costmap/obstacle_layer/scan/min_obstacle_height: 0.0
* /move_base/global_costmap/obstacle_layer/scan/topic: scan
* /move_base/global_costmap/obstacle_layer/track_unknown_space: True
* /move_base/global_costmap/obstacle_layer/unknown_threshold: 15
* /move_base/global_costmap/obstacle_layer/z_resolution: 0.2
* /move_base/global_costmap/obstacle_layer/z_voxels: 2
* /move_base/global_costmap/plugins: [{'type': 'costma...
* /move_base/global_costmap/publish_frequency: 0.5
* /move_base/global_costmap/robot_base_frame: robot0
* /move_base/global_costmap/robot_radius: 0.2
* /move_base/global_costmap/static_layer/enabled: True
* /move_base/global_costmap/static_map: True
* /move_base/global_costmap/transform_tolerance: 0.5
* /move_base/global_costmap/update_frequency: 1.0
* /move_base/local_costmap/global_frame: map
* /move_base/local_costmap/height: 4.0
* /move_base/local_costmap/inflation_layer/cost_scaling_factor: 5.0
* /move_base/local_costmap/inflation_layer/enabled: True
* /move_base/local_costmap/inflation_layer/inflation_radius: 0.5
* /move_base/local_costmap/map_type: voxel
* /move_base/local_costmap/max_obstacle_height: 0.6
* /move_base/local_costmap/obstacle_layer/bump/clearing: False
* /move_base/local_costmap/obstacle_layer/bump/data_type: PointCloud2
* /move_base/local_costmap/obstacle_layer/bump/marking: True
* /move_base/local_costmap/obstacle_layer/bump/max_obstacle_height: 0.15
* /move_base/local_costmap/obstacle_layer/bump/min_obstacle_height: 0.0
* /move_base/local_costmap/obstacle_layer/bump/topic: mobile_base/senso...
* /move_base/local_costmap/obstacle_layer/combination_method: 1
* /move_base/local_costmap/obstacle_layer/enabled: True
* /move_base/local_costmap/obstacle_layer/mark_threshold: 0
* /move_base/local_costmap/obstacle_layer/max_obstacle_height: 0.6
* /move_base/local_costmap/obstacle_layer/observation_sources: scan bump
* /move_base/local_costmap/obstacle_layer/obstacle_range: 2.5
* /move_base/local_costmap/obstacle_layer/origin_z: 0.0
* /move_base/local_costmap/obstacle_layer/publish_voxel_map: False
* /move_base/local_costmap/obstacle_layer/raytrace_range: 3.0
* /move_base/local_costmap/obstacle_layer/scan/clearing: True
* /move_base/local_costmap/obstacle_layer/scan/data_type: LaserScan
* /move_base/local_costmap/obstacle_layer/scan/marking: True
* /move_base/local_costmap/obstacle_layer/scan/max_obstacle_height: 5.0
* /move_base/local_costmap/obstacle_layer/scan/min_obstacle_height: 0.0
* /move_base/local_costmap/obstacle_layer/scan/topic: scan
* /move_base/local_costmap/obstacle_layer/track_unknown_space: True
* /move_base/local_costmap/obstacle_layer/unknown_threshold: 15
* /move_base/local_costmap/obstacle_layer/z_resolution: 0.2
* /move_base/local_costmap/obstacle_layer/z_voxels: 2
* /move_base/local_costmap/plugins: [{'type': 'costma...
* /move_base/local_costmap/publish_frequency: 2.0
* /move_base/local_costmap/resolution: 0.05
* /move_base/local_costmap/robot_base_frame: robot0
* /move_base/local_costmap/robot_radius: 0.2
* /move_base/local_costmap/rolling_window: True
* /move_base/local_costmap/static_layer/enabled: True
* /move_base/local_costmap/static_map: False
* /move_base/local_costmap/transform_tolerance: 0.5
* /move_base/local_costmap/update_frequency: 5.0
* /move_base/local_costmap/width: 4.0
* /move_base/oscillation_distance: 0.2
* /move_base/oscillation_timeout: 10.0
* /move_base/planner_frequency: 1.0
* /move_base/planner_patience: 5.0
* /move_base/shutdown_costmaps: False
* /navigation_velocity_smoother/accel_lim_v: 1.0
* /navigation_velocity_smoother/accel_lim_w: 2.0
* /navigation_velocity_smoother/decel_factor: 1.5
* /navigation_velocity_smoother/frequency: 20.0
* /navigation_velocity_smoother/robot_feedback: 2
* /navigation_velocity_smoother/speed_lim_v: 0.8
* /navigation_velocity_smoother/speed_lim_w: 5.4
* /robot/name: turtlebot
* /robot/type: turtlebot
* /robot_description: <?xml version="1....
* /robot_state_publisher/publish_frequency: 5.0
* /rosdistro: indigo
* /rosversion: 1.11.10
NODES
/
amcl (amcl/amcl)
cmd_vel_mux (nodelet/nodelet)
diagnostic_aggregator (diagnostic_aggregator/aggregator_node)
joint_state_publisher (joint_state_publisher/joint_state_publisher)
kobuki_safety_controller (nodelet/nodelet)
map_server (map_server/map_server)
mobile_base_nodelet_manager (nodelet/nodelet)
move_base (move_base/move_base)
navigation_velocity_smoother (nodelet/nodelet)
relay_cmd_data (topic_tools/relay)
robot_manager (nodelet/nodelet)
robot_spawn_whoola_20955_5924150219310216960 (stdr_robot/robot_handler)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz (rviz/rviz)
stdr_gui_node_whoola_20955_4187621309782193888 (stdr_gui/stdr_gui_node)
stdr_server (stdr_server/stdr_server_node)
tf_connector (turtlebot_stdr/tf_connector.py)
auto-starting new master
process[master]: started with pid [20970]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to c1f702fa-cddb-11e4-9ff5-3085a9948f5e
process[rosout-1]: started with pid [20983]
started core service [/rosout]
process[robot_manager-2]: started with pid [21000]
process[stdr_server-3]: started with pid [21001]
[ INFO] [1426730447.485746556]: Initializing nodelet with 4 worker threads.
[ INFO] [1426730447.494901600]: Loading map from image "/opt/ros/indigo/share/turtlebot_stdr/maps/sparse_obstacles.png"
[ INFO] [1426730447.508217086]: Read a 775 X 746 map @ 0.020 m/cell
process[robot_spawn_whoola_20955_5924150219310216960-4]: started with pid [21103]
process[stdr_gui_node_whoola_20955_4187621309782193888-5]: started with pid [21161]
process[relay_cmd_data-6]: started with pid [21164]
process[robot_state_publisher-7]: started with pid [21250]
/opt/ros/indigo/lib/robot_state_publisher/robot_state_publisher
process[diagnostic_aggregator-8]: started with pid [21272]
process[joint_state_publisher-9]: started with pid [21291]
process[mobile_base_nodelet_manager-10]: started with pid [21298]
process[cmd_vel_mux-11]: started with pid [21309]
process[map_server-12]: started with pid [21325]
[ INFO] [1426730448.131314999]: Initializing nodelet with 4 worker threads.
[ INFO] [1426730448.160083397]: Loading nodelet /cmd_vel_mux of type yocs_cmd_vel_mux/CmdVelMuxNodelet to manager mobile_base_nodelet_manager with the following remappings:
[ INFO] [1426730448.160209571]: /cmd_vel_mux/output -> /mobile_base/commands/velocity
process[navigation_velocity_smoother-13]: started with pid [21357]
[ INFO] [1426730448.207489845]: Loading map from image "/opt/ros/indigo/share/turtlebot_stdr/maps/sparse_obstacles.png"
[ INFO] [1426730448.234220681]: Read a 775 X 746 map @ 0.020 m/cell
process[kobuki_safety_controller-14]: started with pid [21388]
[ INFO] [1426730448.292819016]: Loading nodelet /navigation_velocity_smoother of type yocs_velocity_smoother/VelocitySmootherNodelet to manager /mobile_base_nodelet_manager with the following remappings:
[ INFO] [1426730448.292892075]: /navigation_velocity_smoother/odometry -> /odom
[ INFO] [1426730448.292989721]: /navigation_velocity_smoother/robot_cmd_vel -> /mobile_base/commands/velocity
[ INFO] [1426730448.293027822]: /navigation_velocity_smoother/smooth_cmd_vel -> /cmd_vel_mux/input/navi
process[move_base-15]: started with pid [21411]
[ INFO] [1426730448.376823723]: Loading nodelet /kobuki_safety_controller of type kobuki_safety_controller/SafetyControllerNodelet to manager /mobile_base_nodelet_manager with the following remappings:
[ INFO] [1426730448.376890267]: /kobuki_safety_controller/cmd_vel -> /cmd_vel_mux/input/safety_controller
[ INFO] [1426730448.376962984]: /kobuki_safety_controller/events/bumper -> /mobile_base/events/bumper
[ INFO] [1426730448.376997888]: /kobuki_safety_controller/events/cliff -> /mobile_base/events/cliff
[ INFO] [1426730448.377028022]: /kobuki_safety_controller/events/wheel_drop -> /mobile_base/events/wheel_drop
process[amcl-16]: started with pid [21438]
process[tf_connector-17]: started with pid [21494]
process[rviz-18]: started with pid [21507]
[INFO] [WallTime: 1426730448.658466] Centering
[ INFO] [1426730448.705020020]: CmdVelMux : (re)configured [/opt/ros/indigo/share/turtlebot_bringup/param/mux.yaml]
[ INFO] [1426730448.741202542]: rviz version 1.11.7
[ INFO] [1426730448.741267554]: compiled against OGRE version 1.8.1 (Byatis)
[ INFO] [1426730448.868259687]: Loaded new robot, /robot0
[ INFO] [1426730448.868546266]: New robot spawned successfully, with name /robot0.
[ INFO] [1426730449.027210447]: Reconfigure request : 0.800000 5.400000 1.000000 2.000000 1.500000
[robot_manager-2] process has died [pid 21000, exit code -11, cmd /opt/ros/indigo/lib/nodelet/nodelet manager __name:=robot_manager __log:=/home/jihoonl/.ros/log/c1f702fa-cddb-11e4-9ff5-3085a9948f5e/robot_manager-2.log].
log file: /home/jihoonl/.ros/log/c1f702fa-cddb-11e4-9ff5-3085a9948f5e/robot_manager-2*.log
[robot_spawn_whoola_20955_5924150219310216960-4] process has finished cleanly
log file: /home/jihoonl/.ros/log/c1f702fa-cddb-11e4-9ff5-3085a9948f5e/robot_spawn_whoola_20955_5924150219310216960-4*.log
[ INFO] [1426730449.369945113]: Initialising nodelet... [kobuki_safety_controller]
[stdr_gui_node_whoola_20955_4187621309782193888-5] process has died [pid 21161, exit code -11, cmd /opt/ros/indigo/lib/stdr_gui/stdr_gui_node __name:=stdr_gui_node_whoola_20955_4187621309782193888 __log:=/home/jihoonl/.ros/log/c1f702fa-cddb-11e4-9ff5-3085a9948f5e/stdr_gui_node_whoola_20955_4187621309782193888-5.log].
log file: /home/jihoonl/.ros/log/c1f702fa-cddb-11e4-9ff5-3085a9948f5e/stdr_gui_node_whoola_20955_4187621309782193888-5*.log
[ INFO] [1426730449.471562484]: Subscribed to map topic.
[ INFO] [1426730449.506439610]: Kobuki initialised. Spinning up update thread ... [kobuki_safety_controller]
[ INFO] [1426730449.506514009]: Nodelet initialised. [kobuki_safety_controller]
[ INFO] [1426730449.667326239]: Received a 775 X 746 map @ 0.020 m/pix
[ INFO] [1426730449.687929227]: Initializing likelihood field model; this can take some time on large maps...
[ INFO] [1426730449.819378923]: Done initializing likelihood field model.
[ INFO] [1426730450.066249515]: Stereo is NOT SUPPORTED
[ INFO] [1426730450.066360690]: OpenGl version: 4.4 (GLSL 4.4).
[ WARN] [1426730454.266330679]: Waiting on transform from robot0 to world to become available before running costmap, tf error:
[ WARN] [1426730459.297587092]: Waiting on transform from robot0 to world to become available before running costmap, tf error:
[ WARN] [1426730464.328308834]: Waiting on transform from robot0 to world to become available before running costmap, tf error:
[ WARN] [1426730464.667563840]: No laser scan received (and thus no pose updates have been published) for 1426730464.667492 seconds. Verify that data is being published on the /robot0/laser_0 topic.
[ WARN] [1426730469.359750142]: Waiting on transform from robot0 to world to become available before running costmap, tf error:
[ WARN] [1426730474.391097193]: Waiting on transform from robot0 to world to become available before running costmap, tf error:
[ WARN] [1426730479.421713928]: Waiting on transform from robot0 to world to become available before running costmap, tf error:
[ WARN] [1426730479.667116868]: No laser scan received (and thus no pose updates have been published) for 1426730479.667073 seconds. Verify that data is being published on the /robot0/laser_0 topic.
Before
roslaunch turtlebot_gazebo turtlebot_playground.launch
After
roslaunch turtlebot_gazebo turtlebot_world world_name:=playground // corridor, empty
Hello,
there is an issue with this tutorial: http://wiki.ros.org/turtlebot_stage/Tutorials/indigo/Bring%20up%20TurtleBot%20in%20stage
The height of the robot base is jumping all the time. This is aggravating due to the camera in rviz is fixed to the robot base by default.
This happens because stage_ros sends the identity transformation between base_footprint an base_link.
In kobuki_description base_link has a hight of 0.0102m.
We added a corridors world to turtlebot gazebo and a launcher rosarg for it, but it isn't very flexible as it requires the map to be in turtlebot_gazebo.
To be consistent too, we should follow what was done for turtlebot_stage with environment variables and catkin environment hooks for defaults.
We are facing troubles installing the turtlebot-simulator package via apt-get with
sudo apt-get install ros-hydro-turtlebot-simulator
The error we get is:
Depends: ros-hydro-turtlebot-gazebo but it is not going to be installed
If going on and trying to install ros-hydro-turtlebot-gazebo leads to other missing packages.
We also tried to install according to the gazebo website (http://gazebosim.org/wiki/1.9/install and http://gazebosim.org/wiki/Tutorials/1.9/Installing_gazebo_ros_Packages)
but then we faced some dependency issues with sdformat and libsdformat because the ros-hydro-turetlebot-gazebo wants to install gazebo-current and sdformat but gazebo-current install libsdformat which interferes with libsdformat.
Did anyone else face similar issues?
Remove if so
Hi i'm trying to compile the indigo branch, but for some reason catkin doesn't even seem to try compiling turtlebot_simulator. When I do catkin_make --force-cmake, i do see turtlebot_simulator in the "traversing .. packages" list, however the package is not found when i try to roscd, or try to tab complete with catkin_make --pkg
Any ideas what to try?
(sorry if this is a repost, my issue seem to have disappeared)
Not worrying about kobuki simulation for now - we'll do that for groovy. But we need the original gazebo working for fuerte.
Hello I am currently trying to fuse some sensors with IMU on the turtlebot to improve the readings. However I have noticed that the IMU has huge covariances in orientation and angular_velocity field( As shown below). Is there a way to fix this?
Thanks.

With the following error.
Error [Visual.cc:1697] Visual::InsertMesh no submeshes, this is an invalid mesh
Error [Visual.cc:418] Ogre Error:OGRE EXCEPTION(2:InvalidParametersException): Header chunk didn't match either endian: Corrupted stream? in Serializer::determineEndianness at /build/buildd/ogre-1.8-1.8.1+dfsg/OgreMain/src/OgreSerializer.cpp (line 89)
Error [Visual.cc:419] Unable to create a mesh from /home/jihoonl/research/ros/turtlebot/src/turtlebot/turtlebot_description/meshes/sensors/sensor_pole.dae
Error [Visual.cc:1697] Visual::InsertMesh no submeshes, this is an invalid mesh
Error [Visual.cc:418] Ogre Error:OGRE EXCEPTION(2:InvalidParametersException): Header chunk didn't match either endian: Corrupted stream? in Serializer::determineEndianness at /build/buildd/ogre-1.8-1.8.1+dfsg/OgreMain/src/OgreSerializer.cpp (line 89)
Error [Visual.cc:419] Unable to create a mesh from /home/jihoonl/research/ros/turtlebot/src/turtlebot/turtlebot_description/meshes/sensors/sensor_pole.dae
[ INFO] [1426482713.247649758, 1.030000000]: Kobuki(ns = //): <tf_prefix> =
Dbg Plugin model name: mobile_base
[ INFO] [1426482713.247822892, 1.030000000]: Will publish tf. [mobile_base]
Error [Visual.cc:1697] Visual::InsertMesh no submeshes, this is an invalid mesh
Error [Visual.cc:418] Ogre Error:OGRE EXCEPTION(2:InvalidParametersException): Header chunk didn't match either endian: Corrupted stream? in Serializer::determineEndianness at /build/buildd/ogre-1.8-1.8.1+dfsg/OgreMain/src/OgreSerializer.cpp (line 89)
Error [Visual.cc:419] Unable to create a mesh from /home/jihoonl/research/ros/turtlebot/src/turtlebot/turtlebot_description/meshes/sensors/xtion_pro_stack.dae
It seems like FBX collada exported model, sensor_polo.dae and xtion_pro_stack.dae, are not loadable in gazebo. Others dae files are open collada model
Hi
I'm teaching a robotics class that uses the turtlebot simulator. Unfortunately, the classroom was already upgraded to Ubuntu 14.04, requiring us to use ROS indigo. Can somebody please create an Indigo debian for the turtlebot simulator?
Thanks
Nikolaus
I know that the turtlebot packages for ROS Indigo are not yet supported/finished but I hope reporting this issue can help you find and fix the issue.
When launching the turtlebot gazebo simulator using
roslaunch turtlebot_gazebo turtlebot empty_world.launch
A segfault occurs, (I believe in the gzserver), and the gazebo-2 process dies.
The gazebo client window will remain open however none of the models are visible and while I can click on the models and place them in the gazebo window, they disappear as soon as I place them. The models list in the gzclient shows that no models are in the window.
Also running rostopic echo on any of the topics that do show in the rostopic list, reveal that none of the data is being published.
While I was able to run gdb on the nodes launched in the turtlebot_empty_world.launch file, I could not find the error and I am unsure how to run gdb on the entire launch sequence or individually on the gzserver or gzclient.
The reason I believe the segfault is occuring within gzserver process is because I have tried running the turtlebot simulator by opening three terminal windows and running the following commands:
roscore
rosrun gazebo_ros gzserver
roslaunch turtlebot_gazebo turtlebot_empty_world.launch
and the segfault error message will occur in the
rosrun gazebo_ros gzserver's terminal window.
Both methods of running the turtlebot simulator give the same results.
Method one: using just the roslaunch command
Method two: using the three commands listed above.
A full output of the command can be found on my post on ROS Answers.
http://answers.ros.org/question/174374/ros-indigo-turtlebot-gazebo-simulation/
The launch file calls find turtlebot_description.
When i catkin_make my workspace including turtlebot_simulator pkg, the problem happened:
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp: In member function ‘bool gazebo::GazeboRosApiPlugin::deleteLight(gazebo_msgs::DeleteLight::Request&, gazebo_msgs::DeleteLight::Response&)’:
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:783:3: error: ‘LightPtr’ is not a member of ‘gazebo::physics’
gazebo::physics::LightPtr phy_light = world_->Light(req.light_name);
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:783:3: note: suggested alternatives:
In file included from /usr/include/gazebo-2.2/gazebo/msgs/MessageTypes.hh:43:0,
from /usr/include/gazebo-2.2/gazebo/msgs/msgs.hh:24,
from /usr/include/gazebo-2.2/gazebo/physics/Entity.hh:28,
from /usr/include/gazebo-2.2/gazebo/physics/Model.hh:33,
from /usr/include/gazebo-2.2/gazebo/physics/Actor.hh:24,
from /usr/include/gazebo-2.2/gazebo/physics/physics.hh:2,
from /home/wangzhaodong/ros/src/gazebo_ros/include/gazebo_ros/gazebo_ros_api_plugin.h:34,
from /home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:25:
/usr/include/gazebo-2.2/gazebo/msgs/light.pb.h:746:48: note: ‘gazebo::msgs::LightPtr’
typedef boost::shared_ptrgazebo::msgs::Light LightPtr;
^
In file included from /usr/include/gazebo-2.2/gazebo/common/Plugin.hh:43:0,
from /usr/include/gazebo-2.2/gazebo/common/common.hh:28,
from /home/wangzhaodong/ros/src/gazebo_ros/include/gazebo_ros/gazebo_ros_api_plugin.h:35,
from /home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:25:
/usr/include/gazebo-2.2/gazebo/rendering/RenderTypes.hh:70:38: note: ‘gazebo::rendering::LightPtr’
typedef boost::shared_ptr LightPtr;
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:783:29: error: expected ‘;’ before ‘phy_light’
gazebo::physics::LightPtr phy_light = world_->Light(req.light_name);
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:785:7: error: ‘phy_light’ was not declared in this scope
if (phy_light == NULL)
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:799:27: error: ‘class gazebo::physics::World’ has no member named ‘Light’
phy_light = world_->Light(req.light_name);
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp: In member function ‘bool gazebo::GazeboRosApiPlugin::getLightProperties(gazebo_msgs::GetLightProperties::Request&, gazebo_msgs::GetLightProperties::Response&)’:
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:1131:3: error: ‘LightPtr’ is not a member of ‘gazebo::physics’
gazebo::physics::LightPtr phy_light = world_->Light(req.light_name);
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:1131:3: note: suggested alternatives:
In file included from /usr/include/gazebo-2.2/gazebo/msgs/MessageTypes.hh:43:0,
from /usr/include/gazebo-2.2/gazebo/msgs/msgs.hh:24,
from /usr/include/gazebo-2.2/gazebo/physics/Entity.hh:28,
from /usr/include/gazebo-2.2/gazebo/physics/Model.hh:33,
from /usr/include/gazebo-2.2/gazebo/physics/Actor.hh:24,
from /usr/include/gazebo-2.2/gazebo/physics/physics.hh:2,
from /home/wangzhaodong/ros/src/gazebo_ros/include/gazebo_ros/gazebo_ros_api_plugin.h:34,
from /home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:25:
/usr/include/gazebo-2.2/gazebo/msgs/light.pb.h:746:48: note: ‘gazebo::msgs::LightPtr’
typedef boost::shared_ptrgazebo::msgs::Light LightPtr;
^
In file included from /usr/include/gazebo-2.2/gazebo/common/Plugin.hh:43:0,
from /usr/include/gazebo-2.2/gazebo/common/common.hh:28,
from /home/wangzhaodong/ros/src/gazebo_ros/include/gazebo_ros/gazebo_ros_api_plugin.h:35,
from /home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:25:
/usr/include/gazebo-2.2/gazebo/rendering/RenderTypes.hh:70:38: note: ‘gazebo::rendering::LightPtr’
typedef boost::shared_ptr LightPtr;
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:1131:29: error: expected ‘;’ before ‘phy_light’
gazebo::physics::LightPtr phy_light = world_->Light(req.light_name);
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:1133:7: error: ‘phy_light’ was not declared in this scope
if (phy_light == NULL)
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp: In member function ‘bool gazebo::GazeboRosApiPlugin::setLightProperties(gazebo_msgs::SetLightProperties::Request&, gazebo_msgs::SetLightProperties::Response&)’:
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:1161:3: error: ‘LightPtr’ is not a member of ‘gazebo::physics’
gazebo::physics::LightPtr phy_light = world_->Light(req.light_name);
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:1161:3: note: suggested alternatives:
In file included from /usr/include/gazebo-2.2/gazebo/msgs/MessageTypes.hh:43:0,
from /usr/include/gazebo-2.2/gazebo/msgs/msgs.hh:24,
from /usr/include/gazebo-2.2/gazebo/physics/Entity.hh:28,
from /usr/include/gazebo-2.2/gazebo/physics/Model.hh:33,
from /usr/include/gazebo-2.2/gazebo/physics/Actor.hh:24,
from /usr/include/gazebo-2.2/gazebo/physics/physics.hh:2,
from /home/wangzhaodong/ros/src/gazebo_ros/include/gazebo_ros/gazebo_ros_api_plugin.h:34,
from /home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:25:
/usr/include/gazebo-2.2/gazebo/msgs/light.pb.h:746:48: note: ‘gazebo::msgs::LightPtr’
typedef boost::shared_ptrgazebo::msgs::Light LightPtr;
^
In file included from /usr/include/gazebo-2.2/gazebo/common/Plugin.hh:43:0,
from /usr/include/gazebo-2.2/gazebo/common/common.hh:28,
from /home/wangzhaodong/ros/src/gazebo_ros/include/gazebo_ros/gazebo_ros_api_plugin.h:35,
from /home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:25:
/usr/include/gazebo-2.2/gazebo/rendering/RenderTypes.hh:70:38: note: ‘gazebo::rendering::LightPtr’
typedef boost::shared_ptr LightPtr;
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:1161:29: error: expected ‘;’ before ‘phy_light’
gazebo::physics::LightPtr phy_light = world_->Light(req.light_name);
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:1163:7: error: ‘phy_light’ was not declared in this scope
if (phy_light == NULL)
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp: In member function ‘bool gazebo::GazeboRosApiPlugin::spawnAndConform(TiXmlDocument&, std::string, gazebo_msgs::SpawnModel::Response&)’:
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:2407:3: error: ‘LightPtr’ is not a member of ‘gazebo::physics’
gazebo::physics::LightPtr light = world_->Light(model_name);
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:2407:3: note: suggested alternatives:
In file included from /usr/include/gazebo-2.2/gazebo/msgs/MessageTypes.hh:43:0,
from /usr/include/gazebo-2.2/gazebo/msgs/msgs.hh:24,
from /usr/include/gazebo-2.2/gazebo/physics/Entity.hh:28,
from /usr/include/gazebo-2.2/gazebo/physics/Model.hh:33,
from /usr/include/gazebo-2.2/gazebo/physics/Actor.hh:24,
from /usr/include/gazebo-2.2/gazebo/physics/physics.hh:2,
from /home/wangzhaodong/ros/src/gazebo_ros/include/gazebo_ros/gazebo_ros_api_plugin.h:34,
from /home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:25:
/usr/include/gazebo-2.2/gazebo/msgs/light.pb.h:746:48: note: ‘gazebo::msgs::LightPtr’
typedef boost::shared_ptrgazebo::msgs::Light LightPtr;
^
In file included from /usr/include/gazebo-2.2/gazebo/common/Plugin.hh:43:0,
from /usr/include/gazebo-2.2/gazebo/common/common.hh:28,
from /home/wangzhaodong/ros/src/gazebo_ros/include/gazebo_ros/gazebo_ros_api_plugin.h:35,
from /home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:25:
/usr/include/gazebo-2.2/gazebo/rendering/RenderTypes.hh:70:38: note: ‘gazebo::rendering::LightPtr’
typedef boost::shared_ptr LightPtr;
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:2407:29: error: expected ‘;’ before ‘light’
gazebo::physics::LightPtr light = world_->Light(model_name);
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:2408:19: error: ‘light’ was not declared in this scope
if ((isLight && light != NULL) || (model != NULL))
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:2422:68: error: ‘class sdf::SDF’ has no member named ‘Root’
gazebo::msgs::Light msg = gazebo::msgs::LightFromSDF(sdf_light.Root()->GetElement("light"));
^
/home/wangzhaodong/ros/src/gazebo_ros/src/gazebo_ros_api_plugin.cpp:2449:31: error: ‘class gazebo::physics::World’ has no member named ‘Light’
if ((isLight && world_->Light(model_name) != NULL)
Thanks for your attention,and i hope you can help me solve this problem.
Even with zero noise and AMCL deactivated there is an offset between the position of the walls perceived by the robot and shown by the map in RViz.
Might be the map resolution and/or origin is wrong.
@AlexReimann FYI
For this to work, Kobuki & Create simulations need to be working. Work on these can can be tracked here:
Kobuki: yujinrobot/kobuki_desktop#8
Create: ?
Turtlebot-specific issue will be posted here.
Current issues:
I installed gazebo8 and ros kinetic as the instructions from http://gazebosim.org/tutorials/?tut=ros_wrapper_versions#Gazebobuiltfromsource.
When I start the launch file in turltebot_gazebo.
It seemed that mobile_base/commands/velocity is not subscribed by gazebo node.
It never happens in gazebo 7/2 with ros indigo.
Then how can I control the robot in gazebo through ROS?
Can we do it like in the gazebo sdf file?
http://gazebosim.org/tutorials?tut=sensor_noise#Cameranoise
turtlebot present gazebo(version 2.3) launch doesn't compatible gazebo6. will crush when launch.
I update my gazebo version, and find turtlebot gazebo cannot be used....
Hey,
since some time I am not able to let the amcl demo run.
I am just starting the program with following command:
roslaunch turtlebot_gazebo amcl_demo.launch map_file:=/home/schultza/my_map.yaml
my_map was created some time before.
Here is the output:
... logging to /home/schultza/.ros/log/c1a96b00-4495-11e4-b4f1-485ab604aada/roslaunch-Andreas-1030.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://Andreas:40742/
PARAMETERS
NODES
/
amcl (amcl/amcl)
kobuki_safety_controller (nodelet/nodelet)
map_server (map_server/map_server)
move_base (move_base/move_base)
navigation_velocity_smoother (nodelet/nodelet)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[map_server-1]: started with pid [1051]
process[amcl-2]: started with pid [1052]
process[navigation_velocity_smoother-3]: started with pid [1053]
process[kobuki_safety_controller-4]: started with pid [1054]
ERROR: cannot launch node of type [move_base/move_base]: can't locate node [move_base] in package [move_base]
amcl: malloc.c:2372: sysmalloc: Assertion `(old_top == (((mbinptr) (((char _) &((av)->bins[((1) - 1) * 2])) - __builtin_offsetof (struct malloc_chunk, fd)))) && old_size == 0) || ((unsigned long) (old_size) >= (unsigned long)((((__builtin_offsetof (struct malloc_chunk, fd_nextsize))+((2 *(sizeof(size_t))) - 1)) & ~((2 *(sizeof(size_t))) - 1))) && ((old_top)->size & 0x1) && ((unsigned long) old_end & pagemask) == 0)' failed.
[amcl-2] process has died [pid 1052, exit code -6, cmd /home/schultza/catkin_ws/devel/lib/amcl/amcl scan:=scan __name:=amcl _log:=/home/schultza/.ros/log/c1a96b00-4495-11e4-b4f1-485ab604aada/amcl-2.log].
log file: /home/schultza/.ros/log/c1a96b00-4495-11e4-b4f1-485ab604aada/amcl-2.log
^C[kobuki_safety_controller-4] killing on exit
[navigation_velocity_smoother-3] killing on exit
[map_server-1] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
See that move_base and amcl are creating problems.
I might be doing something wrong, but let me just think out loud.
roslaunch turtlebot_gazebo turtlebot_world.launch
Nodes graph tells there's a breakage.

As a reference here's one I got on Indigo machine.

Obvisously due to this e.g. Twist command doesn't take any effect.
Some outputs.
$ rostopic list
/camera/depth/camera_info
/camera/depth/image_raw
/camera/depth/points
/camera/parameter_descriptions
/camera/parameter_updates
/camera/rgb/camera_info
/camera/rgb/image_raw
/camera/rgb/image_raw/compressed
/camera/rgb/image_raw/compressed/parameter_descriptions
/camera/rgb/image_raw/compressed/parameter_updates
/clock
/cmd_vel_mux/active
/cmd_vel_mux/input/navi
/cmd_vel_mux/input/safety_controller
/cmd_vel_mux/input/switch
/cmd_vel_mux/input/teleop
/cmd_vel_mux/parameter_descriptions
/cmd_vel_mux/parameter_updates
/depthimage_to_laserscan/parameter_descriptions
/depthimage_to_laserscan/parameter_updates
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/joint_states
/laserscan_nodelet_manager/bond
/mobile_base/commands/velocity
/mobile_base/sensors/bumper_pointcloud
/mobile_base/sensors/core
/mobile_base_nodelet_manager/bond
/rosout
/rosout_agg
/scan
/tf
/tf_static
$ rosnode list
/bumper2pointcloud
/cmd_vel_mux
/depthimage_to_laserscan
/gazebo
/laserscan_nodelet_manager
/mobile_base_nodelet_manager
/robot_state_publisher
/rosout
$ rosversion turtlebot_gazebo
2.2.2
$ rosversion gazebo_ros
2.5.7
$ rosversion gazebo_ros_control
2.5.7
For installation many packages are build from source (see turtlebot/turtlebot_apps#143 (comment) my footage for that).
$ roslaunch turtlebot_gazebo turtlebot_world.launch
... logging to /home/souflet/.ros/log/760b3eb8-34c5-11e6-97d3-0090f5bd194f/roslaunch-130s-serval-15387.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
deprecated: xacro tags should be prepended with 'xacro' xml namespace.
Use the following script to fix incorrect usage:
find . -iname "*.xacro" | xargs sed -i 's#<\([/]\?\)\(if\|unless\|include\|arg\|property\|macro\|insert_block\)#<\1xacro:\2#g'
when processing file: /home/souflet/link/ROS/kinetic_xenial/cws_household/src/turtlebot/turtlebot/turtlebot_description/robots/kobuki_hexagons_asus_xtion_pro.urdf.xacro
xacro.py is deprecated; please use xacro instead
started roslaunch server http://130s-serval:44680/
SUMMARY
========
PARAMETERS
* /bumper2pointcloud/pointcloud_radius: 0.24
* /cmd_vel_mux/yaml_cfg_file: /home/souflet/link/...
* /depthimage_to_laserscan/output_frame_id: /camera_depth_frame
* /depthimage_to_laserscan/range_min: 0.45
* /depthimage_to_laserscan/scan_height: 10
* /robot_description: <?xml version="1....
* /robot_state_publisher/publish_frequency: 30.0
* /rosdistro: kinetic
* /rosversion: 1.12.2
* /use_sim_time: True
NODES
/
bumper2pointcloud (nodelet/nodelet)
cmd_vel_mux (nodelet/nodelet)
depthimage_to_laserscan (nodelet/nodelet)
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
laserscan_nodelet_manager (nodelet/nodelet)
mobile_base_nodelet_manager (nodelet/nodelet)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
spawn_turtlebot_model (gazebo_ros/spawn_model)
auto-starting new master
process[master]: started with pid [15406]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 760b3eb8-34c5-11e6-97d3-0090f5bd194f
process[rosout-1]: started with pid [15419]
started core service [/rosout]
process[gazebo-2]: started with pid [15443]
process[gazebo_gui-3]: started with pid [15450]
process[spawn_turtlebot_model-4]: started with pid [15457]
process[mobile_base_nodelet_manager-5]: started with pid [15458]
process[cmd_vel_mux-6]: started with pid [15459]
process[bumper2pointcloud-7]: started with pid [15460]
process[robot_state_publisher-8]: started with pid [15461]
process[laserscan_nodelet_manager-9]: started with pid [15491]
process[depthimage_to_laserscan-10]: started with pid [15506]
[ INFO] [1466193341.310227888]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1466193341.311206365]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1466193342.090442528, 0.030000000]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1466193342.131507148, 0.070000000]: Physics dynamic reconfigure ready.
[ INFO] [1466193342.865785296, 0.250000000]: Camera Plugin (robotNamespace = /), Info: Using the 'robotNamespace' param: '/'
[ INFO] [1466193342.872939698, 0.250000000]: Camera Plugin (ns = /) <tf_prefix_>, set to ""
[spawn_turtlebot_model-4] process has finished cleanly
log file: /home/souflet/.ros/log/760b3eb8-34c5-11e6-97d3-0090f5bd194f/spawn_turtlebot_model-4*.log
This is right of the box on a new ROS Indigo install under Ubuntu 14.04. To reproduce run:
$ roscore
$ roslaunch turtlebot_gazebo turtlebot_world.launch
$ roslaunch turtlebot_gazebo amcl_demo.launch
$ roslaunch turtlebot_rviz_launchers view_navigation.launch
Now set a 2D Nav Goal in RViz and robot executes a spiral path toward goal.
Hello,
As I show in the videos above, the Turtlebot is spins around itself a bit, which could affect the direction when I try to go straight. When the real time factor (simulation speed) is normal the robot makes an acceptable straight line, but when the simulation is set to maximum the robot clearly turns to the right. This strange behaviour does not happen in empty worlds, just when the robot is inside a model. Any possible solution to this issue?
Nestor
Video1 - Spining around itself
https://www.youtube.com/watch?v=LdImDUFFOck&feature=youtu.be
Video 2 - Trying to go straight - in 0:40 normal speed is tested
https://www.youtube.com/watch?v=ltf0eb4ZMcE&feature=youtu.be
[rospack] Error: package 'stdr_resources' not found
[librospack]: error while executing command
[ERROR] [1414998671.630268919]: [STDR_PARSER] STDR parser : Failed to load file /resources/specifications/stdr_multiple_allowed.xml'
Error was
Failed to open file
Hello
I am trying to run the launch the turtlebot on gazebo (Gazebo multi-robot simulator, version 1.5.0) by running:
roslaunch turtlebot_gazebo turtlebot_empty_world.launch
and I got the following error message :
Error [parser.cc:712] XML Element[sensor:contact], child of element[link] not defined in SDF. Ignoring.[link]
Error [parser.cc:703] Error reading element
Error [parser.cc:703] Error reading element
Error [parser.cc:369] Unable to read element
Error [parser.cc:319] parse as old urdf model file failed.
Error [World.cc:1440] Unable to read sdf string[<!--
any idea?
Thank you
Does this robot can upgrade to melodic? As the Ubuntu 19.04 will come out, ubuntu18.04 should be support now
run_depend stdr is not an actual package name.
It should depend on stdr_robot, stdr_server, and stdr_gui which are actually used in here
I would prefer if we could use the actual turtlebot's launchers so we make sure we immediately simulate what we are actually using (this is intuitive - takes a while of digging around to realise that we aren't) as well as helping to make sure that our parameters/configuration is in sync (again, this is intuitive - I didn't expect to find a different configuration).
I.e. Gazebo information inside the URDFs/Xacros in turtlebot_description.
One idea:
Duplicate the robot urdfs from turtlebot_description and add the turtlebot_gazebo.urdf.xacro include where necessary. That duplication s****, but it would allow a clear separation.
I installed gazebo8 and ros kinetic as the instructions from https://medium.com/@abhiksingla10/setting-up-ros-kinetic-and-gazebo-8-or-9-70f2231af21a. I need gazebo 8 since Im using VMware Fusion on MacBook. Next I install most of turtlebot packages using apt-get, while turtlebot_simulator, kobuki_desktop, and kobuki_msgs from source.
When I try to run turtlebot_gazebo gmapping demo and visualize in Rviz, the map result is not correct, it creates a lot of obstacles where there is none. I'm quite new to ROS, at first I thought it was installation program, so I remove all ROS, Gazebo etc and repeat the installation, but the same problem still occur.
Attach is the simulation world and rviz map.

Thanks!
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.