berkeleyopenarms / blue_core Goto Github PK
View Code? Open in Web Editor NEWROS metapackage containing the core software needed for running a Blue robot arm
License: MIT License
ROS metapackage containing the core software needed for running a Blue robot arm
License: MIT License



































































...rather than relying on the softstop limits in the robot parameter yaml
Hi, everyone, great work. I wonder if your compliance control algrithom code is open source, because I can't find them on github, but the lead through and compliance effect if impressive on berkeleyopenarms.github.io.
We could probably split this into like 5 separate files?
Soft stops are currently a quadratic P-term.
Need some damping to keep things from freaking out.
(Currently a ROS topic)
#82 introduces a mutex on the driver. This should be moved lower level into the BLDCDriver class.
For some reason, when running the Blue stack on an actual arm, closing the gripper manually leads to the joint_state_publisher reflecting that it is open.
Opening the gripper manually also results in the joint_state_publisher reflecting that it is closing.
I suspect that there is a missing sign change somewhere, but I'm not sure which file to edit. I'm running the stack at 0f72b06
I got error saying that "REQUIRED process [right_arm/blue_controller_manager-2] has died!"
I thought this is happening because I am using the wrong config file, so I tried the following two but both not working.
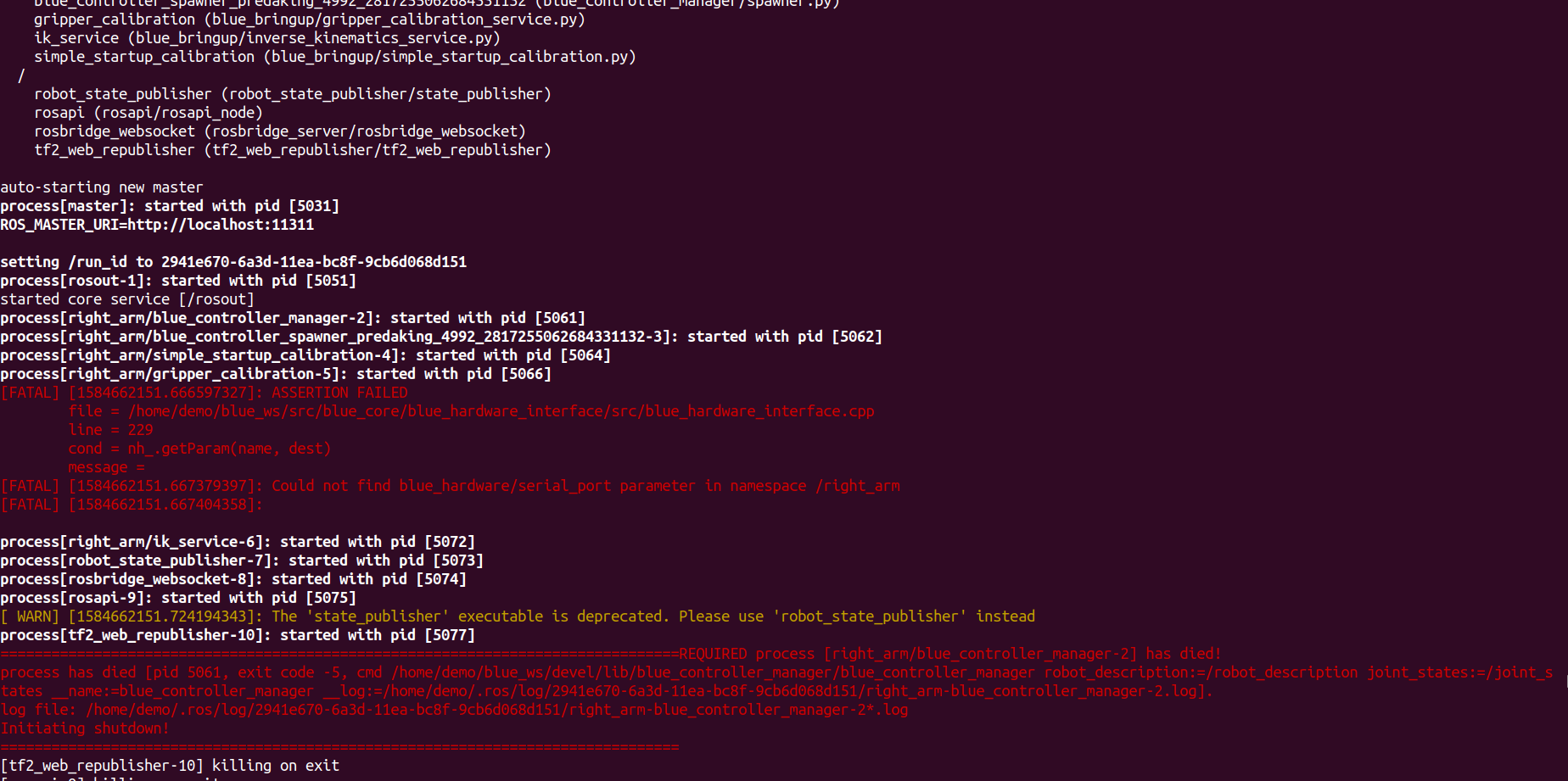
FYI. I am using following setting.
OS: Ubuntu 18.04
ROS dist: Melodic
let's make this more readable!
https://github.com/berkeleyopenarms/blue_core/blob/master/blue_bringup/scripts/calibrate_joint_offsets.py
Do I have to edit "blue_bringup>config>robot_parameters_right.yaml" ?
or do I have to make a new config file using "blue_configs" repo and place it under blue_bringup?
Should we be forcing blue to be fixed at the origin in Gazebo with the world joint?
That stops the model from being moved around which might be inconvenient if people want to simulate the robot somewhere else in a simulated world.
The read and write function should properly match the functions defined in the parent RobotHW class. See https://github.com/ros-controls/ros_control/blob/melodic-devel/hardware_interface/include/hardware_interface/robot_hw.h
It is saying "Robot model parameter not found! Did you remap 'robot_description'?"
I try replaced the "robot_description" in blue.rviz into "blue_description" but did not help.
It seems like ros cannot load robot model. Do I need to run other rosrun before running this?
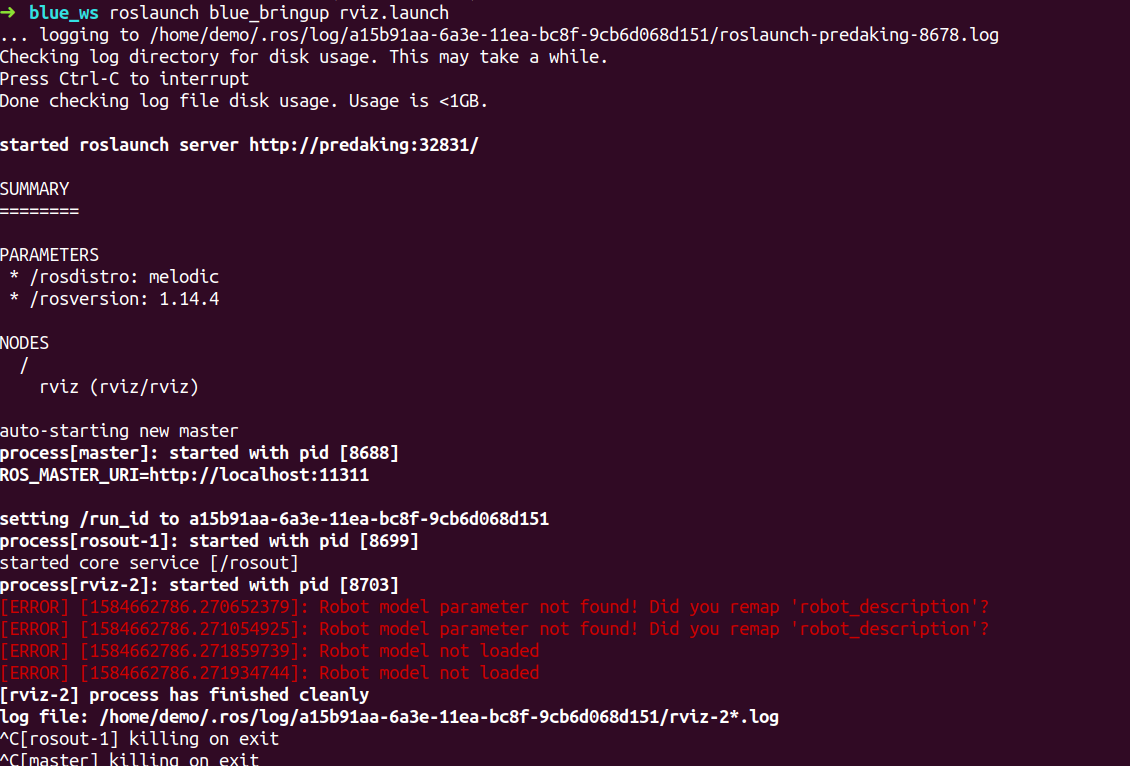
FYI. I am using following setting.
OS: Ubuntu 18.04
ROS dist: Melodic
Instruction says "Proceed to setup the arm with power supply and USB adapter ("Electrical Setup" in Quick Start Guide)" but I couldn't find the Quick Start Guide.
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.