jenniferbuehler / jaco-arm-pkgs Goto Github PK
View Code? Open in Web Editor NEWA model of the Kinova Jaco arm including some tools, e.g. plugins for Gazebo
License: GNU General Public License v3.0
A model of the Kinova Jaco arm including some tools, e.g. plugins for Gazebo
License: GNU General Public License v3.0




































































Hello,
First of all thanks a lot for the work you made for the community. I do not know if you still working on the subject of Jaco control, but I found a small issue in the tutorial, when installing and building the package.
I only succeed to make catkin build of the whole jaco-arm-pkgs if only if I had already installed the package of joint-control-pkgs.
I do not know if it is normal but I was not highlighted ^^.
Thanks a lot,
Julio
I am using effort_controllers/JointGroupEffortController wit ur5 arm in Gazebo. I set up my controller (interface etc) like this,
My controller yaml looks like this,
`arm_controller:
type: effort_controllers/JointGroupEffortController
joints:
I run roslaunch ur_gazebo ur5.launch and I can see my controller topic /arm_controller/command
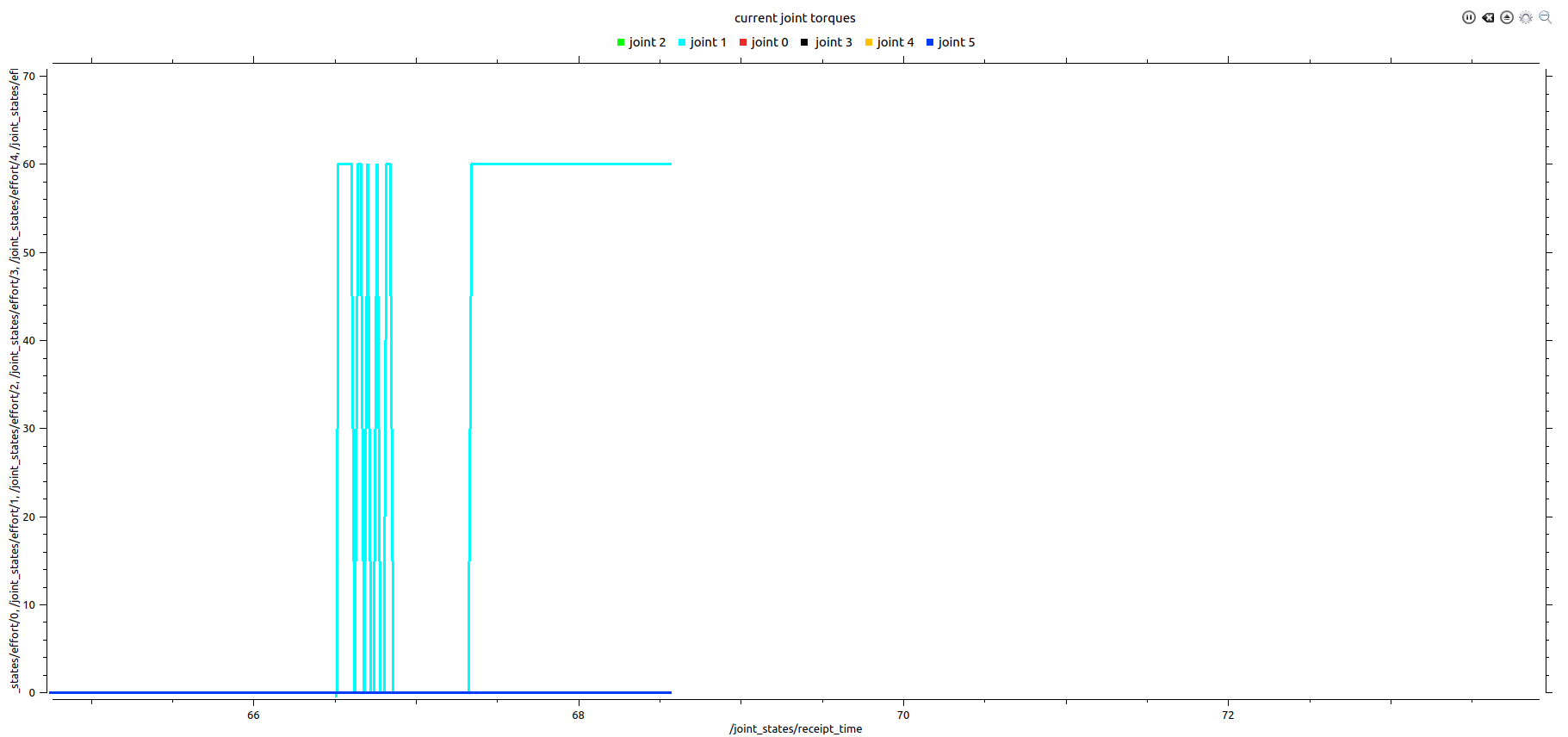
So, When I publish rostopic pub a desired torque of lets say 60 Nm on effort_controllers/JointGroupEffortController. Then it would go to 60 Nm then goes to Zero and the to 60 Nm and again to zero.
I checked my ur5.urdf.xacro for friction, damping, safety controller and limits. Not sure what's wrong.
I checked your jaco-arm-pkgs in which https://github.com/JenniferBuehler/jaco-arm-pkgs/blob/master/jaco_arm/jaco_description/urdf/jaco.urdf.xacro
You have written about issue of robot collapses due to damping values ? Do you have the same behavior as I do with joint_state/Effort (please see the rqt plot below for behavior)
I plot joint_states/efforts to analyze this issue. This issue is seen for every joint. (In the plot, only shoulder_lift_joint is analyzed.)
Plot of the joint state effort looks like this, rqt plot
ROS Melodic , 18.04
gazebo-9.0.0
Universal Robot (UR5) `https://github.com/ros-industrial/universal_robot/tree/melodic-devel
Hi Jennifer,
I previously successfully installed this package with gazebo7 on ubuntu16.04 with ros-kinetic. However, i just upgraded the gazebo from 7.0 to 9.0. And i found the following issues when i redo the catkin_make:

I have 3 of them (libprotobuf, ignition-math4 & ignition-common1) installed, but the errors still pop out and caused the catkin_make failed. For other packages (common-sensors, convenience-pkgs, gazebo-pkgs, general-message-pkgs, graspit-pkgs, joint-control-pkgs, moveit-pkgs & urdf-tools-pkgs) are all can be successfully catkin_make.
Can you guide me how to solve this problems?
Best regards.
Samuel
When I try to load the model with joint controllers with commend roslaunch jaco_on_table jaco_on_table_gazebo_controlled.launch , the following error occurs:
(py2_ros) user@user:~/catkin_ws$ roslaunch jaco_on_table jaco_on_table_gazebo_controlled.launch
... logging to /home/user/.ros/log/2f184b26-3311-11e8-ba25-484d7ea4dbcf/roslaunch-user-1415.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://user:32909/
PARAMETERS
NODES
/
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
urdf_spawner (gazebo_ros/spawn_model)
auto-starting new master
process[master]: started with pid [1429]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 2f184b26-3311-11e8-ba25-484d7ea4dbcf
process[rosout-1]: started with pid [1442]
started core service [/rosout]
process[gazebo-2]: started with pid [1469]
process[gazebo_gui-3]: started with pid [1476]
process[urdf_spawner-4]: started with pid [1480]
process[robot_state_publisher-5]: started with pid [1482]
[ INFO] [1522300954.617447272]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1522300954.617812221]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1522300954.623526384]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1522300954.623699493]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1522300956.383025320, 0.024000000]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1522300956.443383772, 0.083000000]: Physics dynamic reconfigure ready.
[ INFO] [1522300956.626582242, 0.260000000]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1522300956.846119553, 0.310000000]: Physics dynamic reconfigure ready.
[ INFO] [1522300956.892458881, 0.310000000]: Creating GazeboJointControl plugin
[ INFO] [1522300956.892494372, 0.310000000]: Creating GazeboJointControlLocalImpl plugin
[ INFO] [1522300956.893470611, 0.310000000]: Gazebo using SetVelocity(): 1
[ INFO] [1522300956.893503998, 0.310000000]: Loading GazeboJointControl
[ INFO] [1522300956.893558068, 0.310000000]: GazeboJointControl: Loading arm component parameters from jaco
[ INFO] [1522300956.893747956, 0.310000000]: ArmComponentsNameManager reading parameters from namespace: /jaco
[ INFO] [1522300956.901199667, 0.310000000]: INFO: Parameter arm_effort_controller_names has not been specified
[ INFO] [1522300956.907262135, 0.310000000]: INFO: Parameter gripper_effort_controller_names has not been specified
[ INFO] [1522300956.907296863, 0.310000000]: GazeboJointControl: Arm component parameters loaded.
[ INFO] [1522300956.908865800, 0.310000000]: Set to load velocity controlers: 1
[ INFO] [1522300956.909963887, 0.310000000]: Setting fmax prints a warning/error but it somehow still is required...
[Err] [ODEJoint.cc:515] SetParam(fmax) boost any_cast error:boost::bad_any_cast: failed conversion using boost::any_cast
[ INFO] [1522300956.912623471, 0.310000000]: Setting fmax prints a warning/error but it somehow still is required...
[Err] [ODEJoint.cc:515] SetParam(fmax) boost any_cast error:boost::bad_any_cast: failed conversion using boost::any_cast
[ INFO] [1522300956.914435761, 0.310000000]: Setting fmax prints a warning/error but it somehow still is required...
[Err] [ODEJoint.cc:515] SetParam(fmax) boost any_cast error:boost::bad_any_cast: failed conversion using boost::any_cast
[ INFO] [1522300956.916228976, 0.310000000]: Setting fmax prints a warning/error but it somehow still is required...
[Err] [ODEJoint.cc:515] SetParam(fmax) boost any_cast error:boost::bad_any_cast: failed conversion using boost::any_cast
[ INFO] [1522300956.918060900, 0.310000000]: Setting fmax prints a warning/error but it somehow still is required...
[Err] [ODEJoint.cc:515] SetParam(fmax) boost any_cast error:boost::bad_any_cast: failed conversion using boost::any_cast
[ INFO] [1522300956.919843304, 0.310000000]: Setting fmax prints a warning/error but it somehow still is required...
[Err] [ODEJoint.cc:515] SetParam(fmax) boost any_cast error:boost::bad_any_cast: failed conversion using boost::any_cast
[ INFO] [1522300956.921691325, 0.310000000]: Setting fmax prints a warning/error but it somehow still is required...
[Err] [ODEJoint.cc:515] SetParam(fmax) boost any_cast error:boost::bad_any_cast: failed conversion using boost::any_cast
[ INFO] [1522300956.923385455, 0.310000000]: Setting fmax prints a warning/error but it somehow still is required...
[Err] [ODEJoint.cc:515] SetParam(fmax) boost any_cast error:boost::bad_any_cast: failed conversion using boost::any_cast
[ INFO] [1522300956.924703114, 0.310000000]: Setting fmax prints a warning/error but it somehow still is required...
[Err] [ODEJoint.cc:515] SetParam(fmax) boost any_cast error:boost::bad_any_cast: failed conversion using boost::any_cast
[ INFO] [1522300956.926634623, 0.310000000]: GazeboJointControl loaded.
[ INFO] [1522300956.931606734, 0.310000000]: Creating GazeboJointStateClient plugin
[ INFO] [1522300956.933207004, 0.310000000]: GazeboJointStateClient subscription topic: jaco/joint_control
[ INFO] [1522300956.933283030, 0.310000000]: GazeboJointStateClient: Loading arm component parameters from jaco
[ INFO] [1522300956.933392528, 0.310000000]: ArmComponentsNameManager reading parameters from namespace: /jaco
[ INFO] [1522300956.940185307, 0.310000000]: INFO: Parameter arm_effort_controller_names has not been specified
[ INFO] [1522300956.945620999, 0.310000000]: INFO: Parameter gripper_effort_controller_names has not been specified
[ INFO] [1522300956.945887729, 0.310000000]: Gazebo joint: 'jaco_arm_0_joint' is registered as 'jaco_on_table::jaco_arm_0_joint'
[ INFO] [1522300956.945931081, 0.310000000]: Gazebo joint: 'jaco_arm_1_joint' is registered as 'jaco_on_table::jaco_arm_1_joint'
[ INFO] [1522300956.945948711, 0.310000000]: Gazebo joint: 'jaco_arm_2_joint' is registered as 'jaco_on_table::jaco_arm_2_joint'
[ INFO] [1522300956.945965155, 0.310000000]: Gazebo joint: 'jaco_arm_3_joint' is registered as 'jaco_on_table::jaco_arm_3_joint'
[ INFO] [1522300956.945990129, 0.310000000]: Gazebo joint: 'jaco_arm_4_joint' is registered as 'jaco_on_table::jaco_arm_4_joint'
[ INFO] [1522300956.946017147, 0.310000000]: Gazebo joint: 'jaco_arm_5_joint' is registered as 'jaco_on_table::jaco_arm_5_joint'
[ INFO] [1522300956.946044983, 0.310000000]: Gazebo joint: 'jaco_finger_joint_0' is registered as 'jaco_on_table::jaco_finger_joint_0'
[ INFO] [1522300956.946073523, 0.310000000]: Gazebo joint: 'jaco_finger_joint_2' is registered as 'jaco_on_table::jaco_finger_joint_2'
[ INFO] [1522300956.946099940, 0.310000000]: Gazebo joint: 'jaco_finger_joint_4' is registered as 'jaco_on_table::jaco_finger_joint_4'
[ INFO] [1522300956.954853293, 0.310000000]: Creating GazeboJointStatePublisher plugin
[ INFO] [1522300956.956328960, 0.310000000]: Joint state publish topic: jaco/joint_state
[ INFO] [1522300956.958319949, 0.310000000]: Joints to not cap to [-PI,PI] in GazeboJointStatePublisher:
[ INFO] [1522300956.958406177, 0.310000000]: jaco_arm_1_joint
[ INFO] [1522300956.958448646, 0.310000000]: jaco_arm_2_joint
[ INFO] [1522300956.958538120, 0.310000000]: GazeboJointStatePublisher: Loading arm component parameters from jaco
[ INFO] [1522300956.958629361, 0.310000000]: ArmComponentsNameManager reading parameters from namespace: /jaco
[ INFO] [1522300956.966328642, 0.310000000]: INFO: Parameter arm_effort_controller_names has not been specified
[ INFO] [1522300956.971544025, 0.310000000]: INFO: Parameter gripper_effort_controller_names has not been specified
[ INFO] [1522300956.982901223, 0.310000000]: Creating GazeboJointTrajectoryServer plugin
[ INFO] [1522300956.982928517, 0.310000000]: Loading GazeboJointTrajectoryServer
[ INFO] [1522300956.983058013, 0.310000000]: GazeboJointTrajectoryServer: Creating trajectory action server, reading ROS parameters from namespaces jaco_trajectory and jaco
[ INFO] [1522300956.983104096, 0.310000000]: ArmComponentsNameManager reading parameters from namespace: /jaco
[ INFO] [1522300956.990586655, 0.310000000]: INFO: Parameter arm_effort_controller_names has not been specified
[ INFO] [1522300956.996172250, 0.310000000]: INFO: Parameter gripper_effort_controller_names has not been specified
[ INFO] [1522300956.996290852, 0.310000000]: Reading joint trajectory parameters from namespace jaco_trajectory
[ INFO] [1522300956.997653948, 0.310000000]: Joint trajectory action topic name: </jaco/joint_trajectory_action>
[ INFO] [1522300956.999012459, 0.310000000]: Goal angles tolerance: <0.015000>
[ INFO] [1522300957.000357121, 0.310000000]: Intermediate goal angles tolerance: <0.030000>
[ INFO] [1522300957.001901730, 0.310000000]: Trajectory goal angles safety limit: <-1.000000>
[ INFO] [1522300957.003160877, 0.310000000]: Using trajectory position mode: <1>
[ INFO] [1522300957.004669528, 0.310000000]: Using online control: <0>
[ INFO] [1522300957.006142515, 0.310000000]: Exceed duration wait factor: <2.000000>
[ INFO] [1522300957.006316732, 0.310000000]: Max velocity for joint jaco_arm_0_joint specified as 0.8
[ INFO] [1522300957.006362524, 0.310000000]: Max velocity for joint jaco_arm_1_joint specified as 0.8
[ INFO] [1522300957.006384892, 0.310000000]: Max velocity for joint jaco_arm_2_joint specified as 0.8
[ INFO] [1522300957.006405690, 0.310000000]: Max velocity for joint jaco_arm_3_joint specified as 0.8
[ INFO] [1522300957.006427251, 0.310000000]: Max velocity for joint jaco_arm_4_joint specified as 0.8
[ INFO] [1522300957.006449134, 0.310000000]: Max velocity for joint jaco_arm_5_joint specified as 0.8
[ INFO] [1522300957.006470628, 0.310000000]: Max velocity for joint jaco_finger_joint_0 specified as 0.3
[ INFO] [1522300957.006491795, 0.310000000]: Max velocity for joint jaco_finger_joint_2 specified as 0.3
[ INFO] [1522300957.006511000, 0.310000000]: Max velocity for joint jaco_finger_joint_4 specified as 0.3
[ INFO] [1522300957.007475161, 0.310000000]: Initializing trajectory action server for 9 joints.
[urdf_spawner-4] process has finished cleanly
log file: /home/user/.ros/log/2f184b26-3311-11e8-ba25-484d7ea4dbcf/urdf_spawner-4*.log
[ INFO] [1522300957.027841132, 0.310000000]: Action server for Joint Trajectory started. Using position mode: 1
[ INFO] [1522300957.027879395, 0.310000000]: Joint trajectory action server running.
[FATAL] [1522300957.030986631, 0.311000000]: Only support 1 axis
gzserver: /usr/include/boost/thread/pthread/recursive_mutex.hpp:113: void boost::recursive_mutex::lock(): Assertion `!pthread_mutex_lock(&m)' failed.
Aborted (core dumped)
[gazebo-2] process has died [pid 1469, exit code 134, cmd /home/user/catkin_ws/src/gazebo_ros_pkgs/gazebo_ros/scripts/gzserver -e ode -s libgazebo_world_plugin_loader.so worlds/empty.world __name:=gazebo __log:=/home/user/.ros/log/2f184b26-3311-11e8-ba25-484d7ea4dbcf/gazebo-2.log].
log file: /home/user/.ros/log/2f184b26-3311-11e8-ba25-484d7ea4dbcf/gazebo-2*.log
[gazebo_gui-3] process has finished cleanly
log file: /home/user/.ros/log/2f184b26-3311-11e8-ba25-484d7ea4dbcf/gazebo_gui-3*.log
I'm using Ubuntu 16.04.4 LTS, ROS Kinetic, and python 2.7.14. And there is no problem load the model without controllers.
After successfully installing joint state publisher GUI using the command :sudo apt install joint-state-publisher-gui I ran ~/catkin_ws$ rosed jaco_description jaco_gazebo.launch which gave me the following error:
Couldn't find package [jaco_description]
I have joint control packages installed.
Hello there,
I am currently trying to conduct simulation with a robot with two arm in gazebo based on this repository.
Here is the problem I met, I'm trying to control the left and right arm with the gzplugin_joint_control. What I do is simply reuse the gzplugin_joint_control macro twice, first the left arm and then the right arm, with different namespaces. But when running the program I got "Joint name right_arm_0_joint not found in joint controller joints." for gazebo_joint_state_client plugin and gazebo_joint_trajectory_server plugin.
I printed the names of the joint in jntMap and find it only have the joints from the left arm. I tried to only use the gzplugin_joint_control macro with the right arm and find everything works well. I guess there may be some thing that was initiate when first use the maco and not changed when second use.
My implementation is at here: https://github.com/cangjiaxaun/segway.git
The segway_gazebo_controlled.launch file in the launch folder is the file that have the problem I described above.
Deprecation warning: parameter 'allowed_execution_duration_scaling' moved into namespace 'trajectory_execution'.
Please, adjust file trajectory_execution.launch.xml!
When I try changing param in that file, I get the same error.
Deprecation warning: parameter 'allowed_goal_duration_margin' moved into namespace 'trajectory_execution'.
My gazebo simulator is not moving according to the simulation in moveit, so I think this error may be the problem.
Hi,
i have a question about the speed of the ActionServer. Why does the "Playing trajectory!" step takes exactly 0.5 seconds. My node runs with a frequency of 25Hz and i want that the robot reaches new goals also with a frequency of 25Hz. I have another robot with an ActionServer and there it works very fine.
I tried to adjust some parameters but i did not find the right one to change the frequency. Now the robot is moving just step by step but i need a steadily movement.
I add a full step of the ActionServer:
[ INFO] [1464098028.405922032, 86.014000000]: Received joint trajectory goal, trajectory size
[ INFO] [1464098028.406015300, 86.014000000]: Checking trajectory's validity
[ INFO] [1464098028.406066718, 86.014000000]: Trajectory is eligible for execution, goal accepted
[ INFO] [1464098028.406313120, 86.015000000]: Playing trajectory!
[ INFO] [1464098028.907385189, 86.515000000]: JacoTrajectoryActionServer: Execution of trajectory finished. Success=1
My program gets a new pose that it has to reach but with a very small change from the pose before. With this pose i get new joint_values from an inverse kinematik which has to be in the near of the old joint_values. These two joint_value vectors are my new trajectory.
Maybe it is easier to work with velocities but i only want to test something with the jaco simulation and dont want to write so much new code.
I hope you can help me
Best regards
Julius
Hi, thank you very much for the great work !
I wanted to grasp objects with jaco2, and this is very helpful !
However, I can't implement after
roslaunch jaco_on_table jaco_on_table_gazebo_controlled.launch
Jaco2 doesn't maintain the home position and collapses like do "roslaunch jaco_on_table jaco_on_table_gazebo.launch" as bellow.

Also, I tried to do "rosrun jaco_gazebo test_set_joint_state_publisher_vel 0 1", but I got the following error:

I'm using Ubuntu18.04.6 LTS, ROS Melodic and Gazebo v9.
How can I resolve the problem?
Thank you!
hi
thank you for your good jaco arm packages code.
I have question
I want to operate two arm separately.
How can I reach that goal?
thank you
Hi! When I tried to run gym-testing.py using python3, I got this error. Could you help fix it?
jaco-arm-pkgs/jaco_tutorial/jaco_on_table/launch/jaco_on_table_gazebo_controlled.launch
Traceback (most recent call last):
File "/opt/ros/kinetic/lib/xacro/xacro", line 33, in
xacro.main()
File "", line 697, in main
File "", line 627, in eval_self_contained
File "", line 552, in eval_all
xacro.XacroException: Parameters [robot_components_namespace,trajectory_param_namespace] were not set for macro xacro:gzplugin_joint_control
Invalid tag: Cannot load command parameter [robot_description]: command [/opt/ros/kinetic/lib/xacro/xacro '/home/rmlab4/gym-gazebo/gym_gazebo/envs/installation/catkin_ws/src/jaco-arm-pkgs/jaco_tutorial/jaco_on_table/urdf/jaco_on_table_robot_gazebo_ctrl.urdf.xacro' sensor_on_table:=false use_ros_control:=true load_grasp_fix:=false add_transmission_pos:=true add_transmission_vel:=false trajectory_param_namespace:=jaco_trajectory robot_components_namespace:=jaco] returned with code [1].
I am quite new in the programming world and i have been mainly working with python and/or matlab, so c++ is completely unknown to me. I was wondering if you could give an intuition about what is written in the code of simple joint trajectory client?
Any help is welcome.
Thanks and keep up the great work!
There is a "flaw" in the MoveIt! collision detection: It checks for collisions only at the trajectory key frames. If there is a collision in-between frames, it is not recognized.
A workaround for this should be found asap.
How do we add, say a sphere to the world, so while running roslaunch jaco_gazebocontrolled.launch, this sphere shows up. I tried modifying the default world in the jaco_gazebo_controlled.launch file, but this doesn't work and throws up some errors. Thanks!
Hi Jennifer,
I saw your post at kinova-ros repository. And I have fetch this new kinova_dev.
I got this error
"/usr/bin/ld: cannot find -ljaco_trajectory_action_server
collect2: error: ld returned 1 exit status"
when catkin_make the jaco_kinova package
I have catkin_make the jaco_joints package before catkin_make the jaco_kinova package, and I can find libjaco_trajectory_action_server.so at the devel/lib folder.
Now I changed the line "jaco_trajectory_action_server" to ${jaco_joints_LIBRARIES}, but since I didn't actually use the trajectory server I don't know whether this will work or not
And I would like to help you test the jaco_kinova on my jaco arm.
Hi, Jennifer
Do you have the Jaco2 model with 2 fingers only?
Hi,
I hope you are good. I am having a problem in configuring the arm for my robot using moveit. I am following your tutorial and I am attaching the images of the "Setup Jaco with Moveit" tutorial, launch file and also the error I get.
I generated the Moveit packages, and after I was doing this step and now I am stuck....!!
I have done the moveit configuration for my Arm. I downloaded your packages and then I was referring to the order of files in those packages to do it for mine
I was following the wiki tutorial of moveit configuration for jaco. So I was doing it for my arm in the proper sequence as mentioned on the page. Have I missed another wikipage..? Please tell me..!!
There are two move it packages, Jaco_moveit and Jaco_on_table_moveit ... and so what I didn't understand was to include the launch file from another moveit package...!!
I didn't do a new moveit configuration for the jaco arm. I am refering to the packages that are on your github. I am doing the moveit configuration for UR5 arm with summit XL
I don't understand this step in the launch file. The first one below since that launch file is another package. Why do we call it here.
I am attaching the files for the error i get and also the summit configuration.




Hi,
Thank you for your work, it is very help full!
I followed your tutorial on both Kinetic and Jade and encountered the same issue.
When I call
$ roslaunch jaco_on_table jaco_on_table_gazebo.launch
gazebo launches with the message:
auto-starting new master
process[master]: started with pid [75742]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 660eaf7a-3b3d-11e7-be79-000c29df71f8
process[rosout-1]: started with pid [75755]
started core service [/rosout]
process[gazebo-2]: started with pid [75765]
process[gazebo_gui-3]: started with pid [75775]
process[urdf_spawner-4]: started with pid [75785]
[ INFO] [1495052056.121886229]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1495052056.122879854]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1495052056.472461454, 0.022000000]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1495052056.544991599, 0.081000000]: Physics dynamic reconfigure ready.
[urdf_spawner-4] process has finished cleanly
log file: /home/phil/.ros/log/660eaf7a-3b3d-11e7-be79-000c29df71f8/urdf_spawner-4*.log
One odd thing compared to your tutorial is that the robot doesn't have the same colours as in your tutorial (all white on Jade and all black on Kinetic), but it is not the main issue.
When I go on with the
$ roslaunch jaco_on_table jaco_on_table_gazebo_controlled.launch
which displays the message:
auto-starting new master
process[master]: started with pid [76372]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 016e02cc-3b3e-11e7-9ff4-000c29df71f8
process[rosout-1]: started with pid [76385]
started core service [/rosout]
process[gazebo-2]: started with pid [76401]
process[gazebo_gui-3]: started with pid [76408]
process[urdf_spawner-4]: started with pid [76419]
process[robot_state_publisher-5]: started with pid [76420]
[ INFO] [1495052316.902714999]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1495052316.903913344]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1495052317.337042070, 0.022000000]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1495052317.638801684, 0.112000000]: Physics dynamic reconfigure ready.
[urdf_spawner-4] process has finished cleanly
log file: /home/phil/.ros/log/016e02cc-3b3e-11e7-9ff4-000c29df71f8/urdf_spawner-4*.log
The robots appears already collapsed.
It is to be noted that I had to implement the fix around line 125 in the GazeboJointControl.cpp
physics::JointControllerPtr _modelJointController = _parent->GetJointController(); (out of scope)
in order to run catkin_make on the project.
Hi @JenniferBuehler,
First, thanks for the multidof controller. It should be quite useful.
I'm trying to use the same to control a quadrotor in moveit.
The problem I'm facing is that I am not able to run RobotTrajectoryExecutor. This is the error I'm getting.
[ERROR] [1460076394.851834890, 2231.848000000]: RobotTrajectoryExecutor: Joint trajectory action client not connected: /joint_trajectory_action
[ERROR] [1460076394.851876655, 2231.848000000]: RobotTrajectoryExecutor: Path execution action client not connected: /navigate_path
[ERROR] [1460076394.851910877, 2231.848000000]: RobotTrajecoryExecutor: Failed to connect to clients, hence can't execute RobotTrajectory
[ERROR] [1460076394.851933646, 2231.848000000]: Failed to send trajectory part 1 of 1 to controller no-name
I understand that there's not client for the Joint Trajectory Action and Path Execution Action. But my doubt is who should be the client for this action ? If I'm using a simulated robot, should this be gazebo ?
Can you throw some light on this please.
Ankit
[ 89%] Built target test_set_joint_state_publisher_vel
~/catkin_ws/src/jaco-arm-pkgs/jaco_arm/jaco_gazebo/src/JacoGazeboJointControlLocalImpl.cpp: In constructor ‘gazebo::JacoGazeboJointControlLocalImpl::JacoGazeboJointControlLocalImpl()’:
~/catkin_ws/src/jaco-arm-pkgs/jaco_arm/jaco_gazebo/src/JacoGazeboJointControlLocalImpl.cpp:84:44: error: cannot call member function ‘void gazebo::common::Console::SetQuiet(bool)’ without object
gazebo::common::Console::SetQuiet(false);
^
make[2]: *** [jaco-arm-pkgs/jaco_arm/jaco_gazebo/CMakeFiles/jaco_gazebo_joint_control.dir/src/JacoGazeboJointControlLocalImpl.cpp.o] Error 1
make[1]: *** [jaco-arm-pkgs/jaco_arm/jaco_gazebo/CMakeFiles/jaco_gazebo_joint_control.dir/all] Error 2
make: *** [all] Error 2
Invoking "make -j4 -l4" failed
I am receiving the above error output when I try running catkin_make. My usual fix of simply running catkin_make again isn't working (I have very little idea as to what I am doing). Does it have to do with the version of Gazebo that is installed? I am using Gazebo 2.2.6 because that is the one that comes with ROS Indigo, but assuming everything else is equal and it helps, I could wipe off Indigo and install Jade to therefore use a later version of Gazebo.
OS: Ubuntu 14.04
ROS: Indigo
Gazebo: 2.2.6
Dear Jennifer,
Thank you very much for your kind share of your work. I have learnt a lot from the jaco-arm-pkgs.
Now I am using a jaco2 arm and trying to modify the models in the jaco-arm-pkgs to make it work for the jaco2 arm. When I use roslaunch jaco_on_table jaco_on_table_gazebo_controlled.launch to launch my jaco2 urdf model, I found the fixed joint "jaco_on_table" appear in the spawned jaco gazebo model, which is not used in my moveit model. The "jaco_on_table" is similar to the joint "base_to_jaco_on_table" in your model.
Could you please tell me how to delete this joint in the gazebo model? Thank you very much~
Hi,
I am facing a small issue. When I run demo.launch from jaco_on_table_moveit, the arm keeps repeating the last plan. How to fix this?
Hi Jennifer,
This might be a little bit out of context, but after I finished the Gazebo+Moveit+Rviz tutorial, I tried to use C++/Python API to control the arm, and came across following issues 👍
Thanks very much and great job !
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.
{kind=link}