hannobraun / embedded-test-stand Goto Github PK
View Code? Open in Web Editor NEWA test stand for firmware applications.
License: Other
A test stand for firmware applications.
License: Other
I no longer intend to use it, so it's bound to become broken over time.
The "lpc8xx-hal" dependency in lpc845-test-stand/test-assistant/Cargo.lock is still at401d73d6a3f2c643d4d496d856c727b59bada6af, but the latest hal commit is bec1cf72a00d86beaeaa43bea78e39542db12888.
When I update this dep to bec1cf72a00d86beaeaa43bea78e39542db12888 by changing
-source = "git+https://github.com/lpc-rs/lpc8xx-hal.git#401d73d6a3f2c643d4d496d856c727b59bada6af"
+source = "git+https://github.com/lpc-rs/lpc8xx-hal.git#bec1cf72a00d86beaeaa43bea78e39542db12888"I get the following error while building:
➜ test-assistant git:(master) ✗ cargo build
Compiling lpc8xx-hal v0.8.2 (https://github.com/lpc-rs/lpc8xx-hal.git#bec1cf72)
Compiling firmware-lib v0.1.0 (/<redacted>/embedded-test-stand/test-stand-infra/firmware-lib)
error[E0369]: cannot subtract `u32` from `lpc8xx_hal::mrt::Ticks`
--> /<redacted>/embedded-test-stand/test-stand-infra/firmware-lib/src/pin_interrupt.rs:100:46
|
100 | period = Some(mrt::MAX_VALUE - self.timer.value());
| -------------- ^ ------------------ u32
| |
| lpc8xx_hal::mrt::Ticks
error: aborting due to previous error
For more information about this error, try `rustc --explain E0369`.
error: could not compile `firmware-lib`.(maybe due to src/mrt.rs:69 in lpc-rs/lpc8xx-hal#298 ?)
Is this on purpose?
It is currently very specifically tailored to the needs of the LPC845 test stand, but the things it does could be exposed through a more generic interface that can be useful to other test stands too.
The test suite requires the test firmware to be running on the device. As of now, this requires manual setup, which is far from optimal, of course. Not only is it tedious, it is also error-prone, as it would be pretty easy to download the wrong firmware, or at least a wrong version.
Ideally, the test suite should make sure the correct firmware is running on the device, and, if necessary, flash it. We could use external tooling for this, like OpenOCD, but I think it might be much nicer to use probe-rs. I've verified that uploading firmware to the LPC845-BRK works great (tested via cargo flash), but there are two problems right now:
cc @Yatekii (just to let you know about the use case I'm thinking about, and in case you have any comments)
Currently, it's a bit of a mess. Some errors are ignored (anything that's relevant to the test will cause a test failure on the host, after all), some are logged, and some cause a panic. It would be better to have a coherent strategy that helps make the tests more robust.
I think it would probably be best to panic on all errors. This should result in a test failure, and as long as semihosting is set up correctly, the panic message should show up on the host (albeit not as part of the test suite output).
Once the test suite controls the firmware on the targets (see #6), we can improve this and show panic messages as part of test output.
It was useful to share code between the target and the assistant, but now that I'm adding more test stands that are not related to the LPC845, it doesn't really make sense to have it as part of the generic test stand infrastructure.
Parts of it should be merged into the test assistant directly, as that is cleaned up and becomes a generic tool that is useful for many test stands. Anything that is generally useful could maybe be merged into LPC8xx HAL.
Currently, the test suite and firmware communicate via USART, simply because that was easy to implement and is readily available. I think this is good enough for now, but it has one disadvantage: If any changes are made to the HAL's USART API, the test suite may not be able to deliver detailed feedback about what broke, since any bugs might break the whole testing infrastructure.
It might be possible to use the on-board programmer to directly manipulate the RAM on the device, and use that as a alternate means of communication. I haven't looked into that yet, and don't know how feasible it would be.
Querying a pin from the test suite waits for a message from the assistant. Since such a message is only sent, if a pin changes, this will result in a time-out when querying for a second time, without a change having been registered in between.
I can think of two straight-forward ways to fix this:
If firmware on the target or the firmware panics, this usually results in a test failure, but the error messages are unhelpful. The test suite just knows that some operation timed out, so that's all it can show.
Both target and assistant are configured to output panic messages to the host via panic-semihosting, but unfortunately those panic messages don't show up on the host. Panic messages will show up, if you start OpenOCD as a standalone process, but currently it is configured to be started by GDB. I don't know why the panic messages don't show up in this configuration, but they don't.
(If the firmware ever panics and you need to see the panic message, do this: In openocd.cfg, comment out the gdb_port and log_output lines, then start OpenOCD without arguments, in that same directory.)
Ideally, the test suite output would show that the firmware panicked, and display the panic message. This should be possible by using probe-rs to attach to the firmware (and possibly upload it before that, see #6).
The USART tests that exist so far are pretty basic. They verify that the USART sends and receives data. I think writing some more tests would be worthwhile, and have added some ideas here.
Some of those might not be possible with the current infrastructure, and actually require additional development boards that assist in the test.
I think some of this might already be tested implicitly, through the host-side baud rate configuration. I honestly don't know though, if that setting has much meaning, considering that the serial data is transported over USB.
In any case, it might be worth verifying that various baud rate configurations are set correctly.
The test firmware currently uses interrupts to receive USART data, so obviously they work. It could be worth verifying that all flags are reset correctly, and the interrupt doesn't actually fire too often.
We could deliberately inject errors into USART communication, and verify that those are handled correctly.
After connecting the target/assistant and flashing the firmware, the first run of the test suite usually fails.
Output from an example run:
running 2 tests
test it_should_read_input_level ... FAILED
test it_should_set_pin_level ... FAILED
failures:
---- it_should_read_input_level stdout ----
Error: TargetPinRead(Timeout)
thread 'it_should_read_input_level' panicked at 'assertion failed: `(left == right)`
left: `1`,
right: `0`: the test returned a termination value with a non-zero status code (1) which indicates a failure', /home/hanno/.rustup/toolchains/stable-x86_64-unknown-linux-gnu/lib/rustlib/src/rust/src/libstd/macros.rs:16:9
note: run with `RUST_BACKTRACE=1` environment variable to display a backtrace
---- it_should_set_pin_level stdout ----
Error: AssistantPinRead(Timeout)
thread 'it_should_set_pin_level' panicked at 'assertion failed: `(left == right)`
left: `1`,
right: `0`: the test returned a termination value with a non-zero status code (1) which indicates a failure', /home/hanno/.rustup/toolchains/stable-x86_64-unknown-linux-gnu/lib/rustlib/src/rust/src/libstd/macros.rs:16:9
failures:
it_should_read_input_level
it_should_set_pin_level
test result: FAILED. 0 passed; 2 failed; 0 ignored; 0 measured; 0 filtered out
Log output of the assistant:
11:57:54.184 Starting assistant.
11:58:06.688 panicked at 'Error receiving from USART0: Usart(Framing)', src/main.rs:564:14
The target shows no sign of problems.
Doing a reset of the target and assistant using the reset button on the boards fixes the problem for me. Subsequent test runs are 100% reliable, as far as I can tell.
I've been aware of this problem for a while, but initially assumed that it is a problem with my machine (at the same time, I started seeing weird USB issues which have since gone away). I've received confirmation that others are having the same problem, so its definitely not something specific to me. If I recall directly, I was doing work on the USART API in LPC8xx HAL when I first saw this, so this might be an issue I introduced there.
For ease of implementation and ease of use, I've decided to base the test assistant on the same hardware that the test target is already using, the LPC845-BRK. This is not ideal, as the same HAL APIs that are supposed to be under test, are used for the test.
It might be better to port the test assistant to a different hardware platform. The STM32F303 Discovery Kit might be a good choice, as that's the hardware used in the Discovery book, and thus might already be commonly available among Rust users.
Opening this PR mainly for documentation and to discuss objections/changes early on (ish).
IMO, the current API for writing GPIO tests is a bit opaque: which pin is set by calling test_stand.assistant.set_pin_low()? How would I even refer to these pins if I were to add more? Could we reconfigure this pin from our test code, during runtime since we have dynamic pins now?
I'd like to propose a new API (documented at the end of this issue).
I already have running code that implements this both for the host API as well as the T-A, but it's a lot of different changes:
So, I'd start by splitting off a PR that only introduces the Test API below– without adding new functionality to the T-A. This may include adding some temporary shims like rejecting all pin numbers in create_gpio_output_pin() that aren't 29 (i.e. the red LED) that can be taken out when implementing the T-A side changes.
Does that work for you? What are your thoughts?
We've designed the interface so that
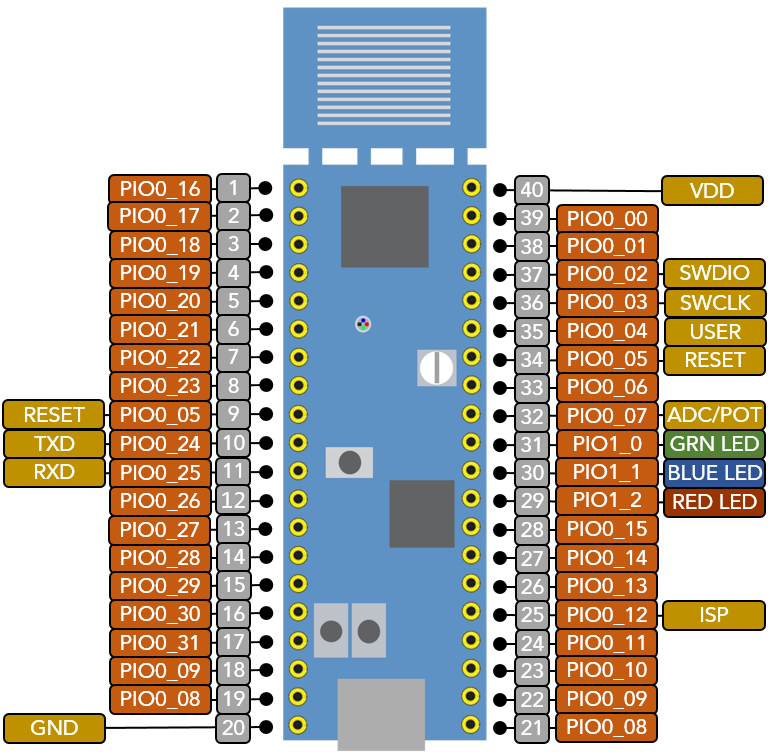
To illustrate this, let's look at the test in test-suite/tests/gpio.rs checking whether voltage changes at the test-assistant's PIO1_2 pin are registered by the target.
Before, it looked like this:
#[test]
fn it_should_read_input_level() -> Result {
let mut test_stand = TestStand::new()?;
test_stand.assistant.set_pin_low()?;
// ^^^^^^^^^^^^^
// unclear: which pin?
assert!(test_stand.target.pin_is_low()?);
// [...]
Ok(())
}Now, it looks like this:
const RED_LED_PIN: PinNumber = 29;
// ^^
// simpler pin numbering
#[test]
fn target_should_read_input_level() -> Result {
// SETUP
let mut test_stand = TestStand::new()?;
let mut out_pin = test_stand
// ^^^^^^
// is of type `OutputPin`
.assistant
.create_gpio_output_pin(RED_LED_PIN, Level::High)?;
// ^^^^^^^^^^^ ^^^^^^^^^^^
// pin used for test set initial pin
// voltage level so
// that pin is off
// RUN TEST
out_pin.set_low()?;
// ^^^^^^^
// can only be called on `OutputPin`s
// sets pin voltage level to 🚨
assert!(test_stand.target.pin_is_low()?); // note: since `test-target` hasn't
// been modified, this hasn't changed
// [...]
// for demonstration purposes, let's add some more code:
let in_pin = out_pin.into_input_pin()?;
// ^^^^^
// is now of type `InputPin`
// this mistake will be prevented at compile time!
in_pin.set_low()?;
// ^^^^^^^
// trying to set the voltage of an input pin 🛑
Ok(())
}Output from cargo test on the host:
Compiling stm32l4-test-suite v0.1.0 (/home/hanno/Projects/braun-embedded/embedded-test-stand/stm32l4-test-stand/test-suite)
Finished test [unoptimized + debuginfo] target(s) in 0.95s
Running ../../target/debug/deps/stm32l4_test_suite-0e23d79b18f2299e
running 0 tests
test result: ok. 0 passed; 0 failed; 0 ignored; 0 measured; 0 filtered out
Running ../../target/debug/deps/usart-9c79a52b3c2777aa
running 2 tests
test it_should_send_messages ... FAILED
test it_should_receive_messages ... FAILED
failures:
---- it_should_send_messages stdout ----
Error: Assistant(UsartWait(Receive(ConnReceiveError(Io(Custom { kind: TimedOut, error: "Operation timed out" })))))
thread 'it_should_send_messages' panicked at 'assertion failed: `(left == right)`
left: `1`,
right: `0`: the test returned a termination value with a non-zero status code (1) which indicates a failure', /home/hanno/.rustup/toolchains/stable-x86_64-unknown-linux-gnu/lib/rustlib/src/rust/library/test/src/lib.rs:191:5
note: run with `RUST_BACKTRACE=1` environment variable to display a backtrace
---- it_should_receive_messages stdout ----
Error: TargetUsartWait(Receive(ConnReceiveError(Io(Custom { kind: TimedOut, error: "Operation timed out" }))))
thread 'it_should_receive_messages' panicked at 'assertion failed: `(left == right)`
left: `1`,
right: `0`: the test returned a termination value with a non-zero status code (1) which indicates a failure', /home/hanno/.rustup/toolchains/stable-x86_64-unknown-linux-gnu/lib/rustlib/src/rust/library/test/src/lib.rs:191:5
failures:
it_should_receive_messages
it_should_send_messages
test result: FAILED. 0 passed; 2 failed; 0 ignored; 0 measured; 0 filtered out
error: test failed, to rerun pass '--test usart'
Output from the target:
14:04:34.612 Starting target...done.
14:04:55.130 Error reading from USART2: Framing
14:04:55.130 panicked at 'Error decoding message: DeserializeBadEncoding', src/main.rs:157:22
Sometimes the assistant also panics. It didn't in the run from which I captured this output.
After running cargo embed again for both target and assistant, it tends to work reliably. This kind of reminds me of #76, but I've yet to look into it more deeply.
After the test target is reset, the USART receive test fails with a timeout error:
running 1 test
test it_should_receive_messages ... FAILED
failures:
---- it_should_receive_messages stdout ----
Error: TargetUsartWait(TargetUsartWaitError(TestLib(Io(Custom { kind: TimedOut, error: "Operation timed out" }))))
thread 'it_should_receive_messages' panicked at 'assertion failed: `(left == right)`
left: `1`,
right: `0`: the test returned a termination value with a non-zero status code (1) which indicates a failure', src/libtest/lib.rs:197:5
note: run with `RUST_BACKTRACE=1` environment variable to display a backtrace.
This still happens, even if I set the timeout value very high.
I've also seen it fail once again after that, with an error message complaining that only about half the expected data was received. But that happens rarely, and I've only ever seen it as a direct follow-up to this failure.
In subsequent test runs, everything works fine, until the target is reset again.
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.