Repository of the paper Multimodal Detection of Unknown Objects on Roads for Autonomous Driving, accepted at IEEE SMC 2022.
To scale autonomous vehicles from small testing regions to the whole world, the reliability of machine learning systems is critical, especially regarding object detection for such which are in proximity to the planned trajectory of an autonomous vehicle. Therefore, this lab topic covers three main tasks:
- Detect lanes and the available driving area on image & lidar data to determine relevant positions in the environment.
- Detect clusters in lidar point clouds within these regions and classify them, if possible.
- For clusters that the lidar cannot classify, project the lidar points into the image space and try to detect an object within this ROI in the image space.
If this fails, a so-called corner case is detected, where an unknown object is detected in a relevant position. Such a system can be used online to detect challenging scenarios or offline as part of an active learning pipeline. This lab project will start with publicly available datasets. Frequently though, these do not contain enough interesting data. Therefore, after analyzing available datasets, it will be determined if a simulation of relevant scenes will be performed in the simulation environment CARLA.

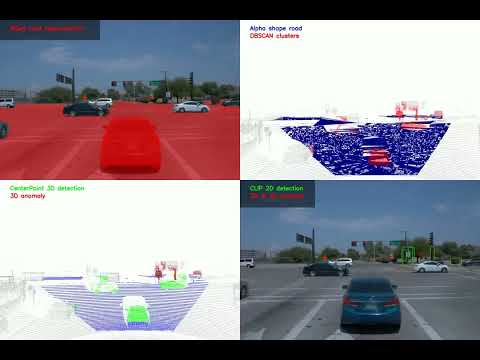
For each scene, we make use of camera (a) and lidar (b) data. Semantic segmentation is applied to the camera image to identify the road, our area of interest (c). These road pixels are then projected into the lidar space (d). The following corner case proposal generation is divided into several steps. First, the point cloud is cropped to only consider the front view. Next, the projected road plane is re-estimated using RANSAC to account for inaccuracies. Alpha shape reconstruction of the plane is used to identify the points of objects that lay on the road. Those points are then clustered via DBSCAN to generate corner case proposals. Next, CenterPoint object detection is applied, and cluster without classifications are marked as anomalies, creating an intermediate anomaly proposal (e). The bounding boxes of those possible anomalies are then mapped onto the 2D camera space (f). Based on a list of classes we deem normal, CLIP classifies them as either an anomaly or one of the non-anomaly classes, producing the final anomaly detection (g).
Short (left) and long (right) video demonstrations are available:

├── CenterPoint # CenterPoint implementation
├── clustering # Lidar clustering & visualization scripts
├── figures # Figures
├── visualizations # Final pipeline visualizations
├── mseg_semantic # Semantic segmentation
└── waymo_tf_extraction # Helper scripts for the Waymo dataset - Clone this repo
- Navigate to the folder mseg_semantic
- Install the mseg_semantic module by running
$ pip install -e ./mseg_semantic. Make sure that you can run$ python -c "import mseg_semantic; print('hello world')"in python - Navigate to the folder /mseg_semantic/mseg-api
- Install the mseg module by running
$ pip install -e ./mseg_semantic/mseg-api. Check if the module was properly installed by runningimport mseg. - Use the pre-trained model mseg-3m.pth for inference
- For each image that is infered the model will save road coordinates. Change the path where these are saved in the file mseg-api/mseg/utils/mask_utils_detectron2.py in line 519-522.
- Run inference on a datasets
$ python -u mseg_semantic/tool/universal_demo.py --config=mseg_semantic/config/test/default_config_360_ms.yaml model_name mseg-3m model_path '/path_to_model/mseg-3m.pth' input_file '/path_to_dataset/' - As the road coordinates are given in camera coordinates they need to be tranformed into the 3D-lidar space. Run
$ python waymo_mapping_clean.py. Make sure the paths given in lines 49-52 are the correct ones. The road masks are gonna be saved under the path specified in line 139.
-
Install CenterPoint following the install documentation
-
Run inference on a dataset and create a prediction file in the folder "results" following e.g. the waymo docs waymo documentation
-
Run the clustering and bounding box alignment
$ python clustering/cluster.py --road_path results/road_mask --lidar_path results/lidar --prediction_path results/detection_pred.pkl --output_path results(or use the already setup VS Code tasks here) -
Visualization of 3D anomaly detection results
$ python clustering/visualize.py --root_path results --prediction_path results/detection_pred.pkl --online(or use the already setup VS Code tasks here -
Visualization of pipeline results
$ python visualize_pipeline.py --root_path results/visualizations --online(or use the already setup VS Code tasks here
- Navigate to the folder /2d_classification
- Install reqirements.txt
$ pip install -r requirements.txt - Run the bounding box mapping script
$ python bbox_mapping.py --camera-path /path_for_raw_images/ --calibration-path /path_for_calibration_files/ --clustering-path /path_for_clustering/ --directory-path /path_for_target_folder/ - Run the CLIP 2D classification script
$ python clip.py --directory-path /path_for_target_folder/ - Run the coloring script to color bounding boxes depending if anomaly or not
$ python images_coloring.py --camera-path /path_for_raw_images --calibration-path /path_for_calibration_files/ --directory-path /path_for_target_folder/ - Run the skript that counts and collects files with anomalies
$ python find_anomalies.py --directory-path /path_for_target_folder/
If you find this code useful for your research, please cite our paper:
@article{Bogdoll_Multimodal_2022_arXiv,
author = {Bogdoll, Daniel and Eisen, Enrico and Scheib, Christin and Nitsche, Maximilian and Z\"{o}llner, J. Marius},
title = {{Multimodal Detection of Unknown Objects on Roads for Autonomous Driving}},
journal = {arXiv preprint:2205.01414},
year = {2022}
}



