CR-NeRF: Cross-Ray Neural Radiance Fields for Novel-view Synthesis from Unconstrained Image Collections
Yifan Yang · Shuhai Zhang · Zixiong Huang · Yubing Zhang . Mingkui Tan
Table of Contents
 |
|---|
| Pipeline of CR-NeRF |
-
If you want to Train & Evaluate, please check dataset.md to prepare dataset, see Training and testing to train and benchmark CR-NeRF using Brandenburg Gate tainingset
-
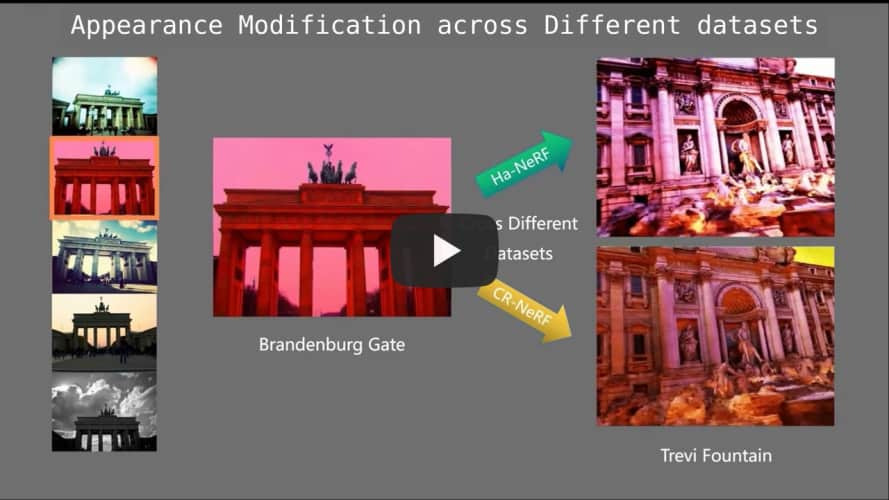
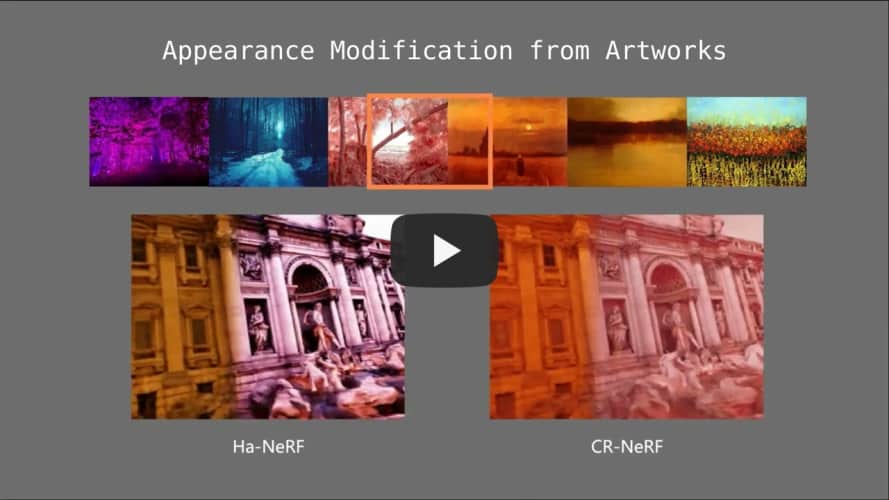
During evaluation, given:
- A RGB image of a desired image style
- Camera position
with our CR-NeRF You will get:
- image:
- with the same camera position as the given one
- with the same image style as the given image
For more details of our CR-NeRF, see architecture visualization in our encoder, transformation net, and decoder




- See docs/installation.md to install all the required packages and setup the models
- See docs/dataset.md to prepare the in-the-wild datasets
- See Training and testing to train and benchmark CR-NeRF using Brandenburg Gate tainingset
Download trained checkpoints from: google drive or Baidu drive password: z6wd
If you want video demo
#Set $scene_name and $save_dir1 and cuda devices in command/get_video_demo.sh
bash command/get_video_demo.shThe rendered video (in .gif format) will be in path "{$save_dir1}/appearance_modification/{$scene_name}"
If you want images for evaluating metrics
bash command/get_rendered_images.shThe rendered images will be in path "{$save_dir1}/{$exp_name1}"
#Set experiment name and cuda devices in train.sh
bash command/train.sh
#Set the experiment name to match the training name, and set cuda devices in test.sh
bash command/test.sh@inproceedings{yang2023cross,
title={Cross-Ray Neural Radiance Fields for Novel-view Synthesis from Unconstrained Image Collections},
author={Yang, Yifan and Zhang, Shuhai and Huang, Zixiong and Zhang, Yubing and Tan, Mingkui},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision},
pages={15901--15911},
year={2023}
}We thank Dong Liu's help in making the video demo
Here are some great resources we benefit from:
By downloading and using the code and model you agree to the terms in the LICENSE.



















































