mport copy
from prettytable import PrettyTable
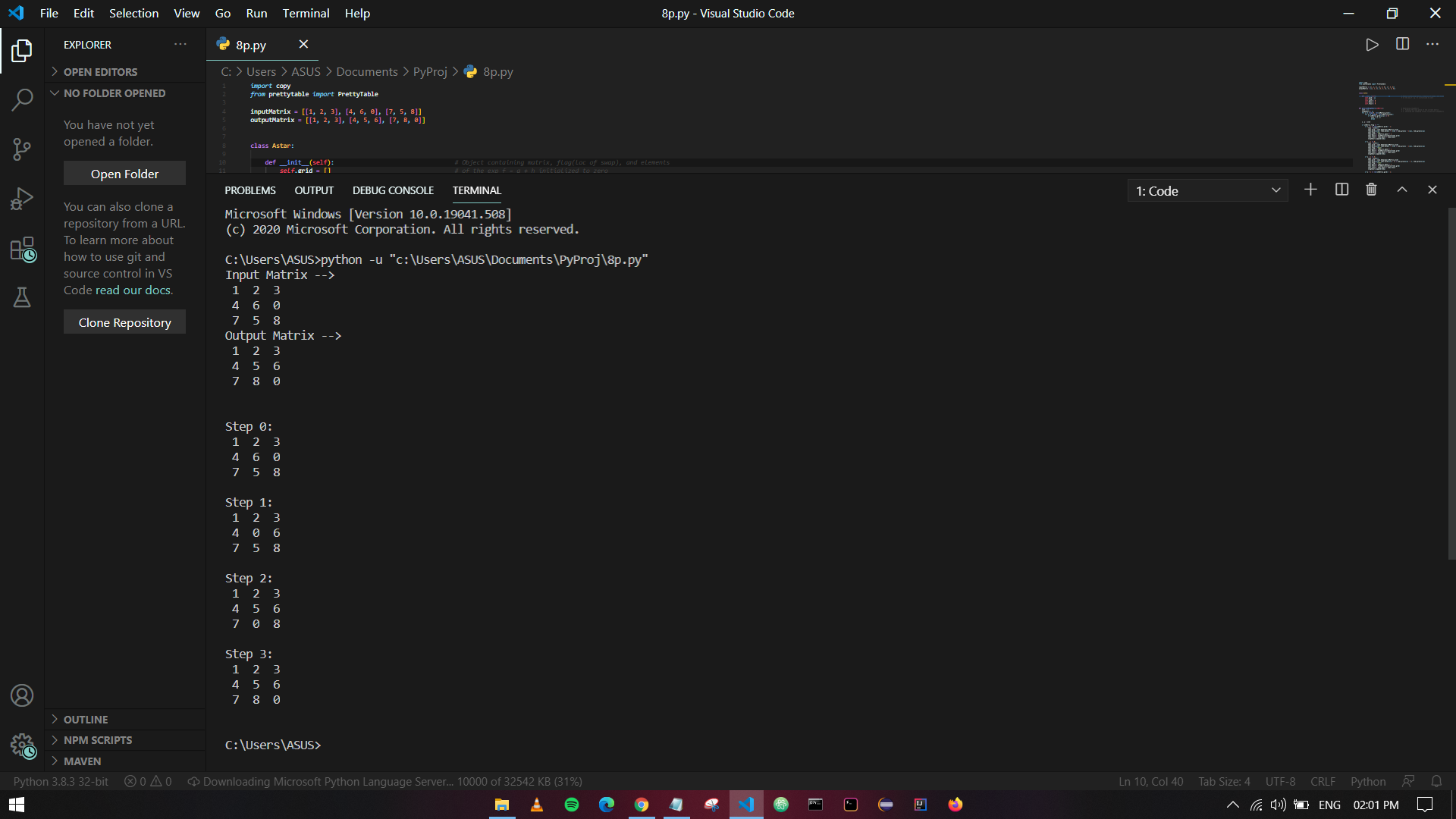
inputMatrix = [[1, 2, 3], [4, 6, 0], [7, 5, 8]]
outputMatrix = [[1, 2, 3], [4, 5, 6], [7, 8, 0]]
class Astar:
def init(self): # Object containing matrix, flag(loc of swap), and elements
self.grid = [] # of the exp f = g + h initialized to zero
self.flag = ""
self.gCost = 0
self.hCost = 0
self.fCost = 0
def generateNeighbours(inMatrix): # Generating neighbours
slot = () # 1. Finding the void place of the current matrix
neighbours = [] # 2. Checking and swapping values to generate neighbours
for i in range(0, len(inMatrix.grid)):
for j in range(0, len(inMatrix.grid)):
if inMatrix.grid[i][j] == 0:
slot = (i, j)
break
x, y = slot
if inMatrix.flag == "":
if x + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x + 1][y] = tobj.grid[x + 1][y], tobj.grid[x][y]
tobj.flag = "up"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if x - 1 >= 0:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x - 1][y] = tobj.grid[x - 1][y], tobj.grid[x][y]
tobj.flag = "down"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if y - 1 >= 0:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x][y - 1] = tobj.grid[x][y - 1], tobj.grid[x][y]
tobj.flag = "left"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if y + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x][y + 1] = tobj.grid[x][y + 1], tobj.grid[x][y]
tobj.flag = "right"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if inMatrix.flag == "up":
if x + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x + 1][y] = tobj.grid[x + 1][y], tobj.grid[x][y]
tobj.flag = "up"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if y - 1 >= 0:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x][y - 1] = tobj.grid[x][y - 1], tobj.grid[x][y]
tobj.flag = "left"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if y + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x][y + 1] = tobj.grid[x][y + 1], tobj.grid[x][y]
tobj.flag = "right"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if inMatrix.flag == "down":
if x - 1 >= 0:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x - 1][y] = tobj.grid[x - 1][y], tobj.grid[x][y]
tobj.flag = "down"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if y - 1 >= 0:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x][y - 1] = tobj.grid[x][y - 1], tobj.grid[x][y]
tobj.flag = "left"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if y + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x][y + 1] = tobj.grid[x][y + 1], tobj.grid[x][y]
tobj.flag = "right"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if inMatrix.flag == "left":
if x + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x + 1][y] = tobj.grid[x + 1][y], tobj.grid[x][y]
tobj.flag = "up"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if x - 1 >= 0:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x - 1][y] = tobj.grid[x - 1][y], tobj.grid[x][y]
tobj.flag = "down"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if y - 1 >= 0:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x][y - 1] = tobj.grid[x][y - 1], tobj.grid[x][y]
tobj.flag = "left"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if inMatrix.flag == "right":
if x + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x + 1][y] = tobj.grid[x + 1][y], tobj.grid[x][y]
tobj.flag = "up"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if x - 1 >= 0:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x - 1][y] = tobj.grid[x - 1][y], tobj.grid[x][y]
tobj.flag = "down"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
if y + 1 <= len(inMatrix.grid) - 1:
tobj = Astar()
tobj.grid = copy.deepcopy(inMatrix.grid)
tobj.grid[x][y], tobj.grid[x][y + 1] = tobj.grid[x][y + 1], tobj.grid[x][y]
tobj.flag = "right"
tobj.gCost = inMatrix.gCost + 1
tobj.hCost = findHeuristicValue(tobj.grid)
tobj.fCost = tobj.gCost + tobj.hCost
neighbours.append(tobj)
return neighbours
def findHeuristicValue(inMatrix): # Comparing position of values of current matrix to the ones of desired matrix
h = 0
for i in range(0, len(inMatrix)):
for j in range(0, len(inMatrix)):
if inMatrix[i][j] != outputMatrix[i][j]:
h += 1
return h
def findBestMatrix(openList): # Select best matrix from open list and return it
bestmatrix = Astar()
mincost = float("inf")
for matrix in openList:
if matrix.fCost <= mincost:
mincost = matrix.fCost
bestmatrix = matrix
return bestmatrix
def printMatrix(matrix): # Formatting matrices
p = PrettyTable()
for row in matrix:
p.add_row(row)
return p.get_string(header=False, border=False)
def pathFinder():
openList = []
closedList = []
current = Astar()
current.grid = inputMatrix
openList.append(current)
steps = 0
print("Input Matrix -->") # Printing Input Matrix
print(printMatrix(current.grid))
print("Output Matrix -->") # Printing Output Matrix
print(printMatrix(outputMatrix))
print()
print()
while True:
current = findBestMatrix(openList)
openList.remove(current)
closedList.append(current)
print("Step {0}:".format(str(steps))) # Printing steps
print(printMatrix(current.grid)) # Printing matrices
print()
if findHeuristicValue(current.grid) == 0:
exit(0)
neighbourList = generateNeighbours(current) # Generating neighbours from the selected matrix
for neighbour in neighbourList:
if neighbour not in openList:
openList.append(neighbour) # Appending neighbours in the open list
steps += 1 # Incrementing steps
pathFinder()