thomashirtz / gym-hybrid Goto Github PK
View Code? Open in Web Editor NEWCollection of OpenAI parametrized action-space environments.
Collection of OpenAI parametrized action-space environments.

























































Hi!
OpenAi gym remove the rendering.py for supporting pygame.
"from gym.envs.classic_control import rendering" would fail in environment.py.
Hello, I am kind of confused about the implementation of the accelerate method at here
According to the following formula from stackexchange (as mentioned in L58),
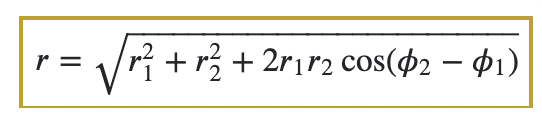
to calculate the magnitude of the sum of to polar vectors, we need to know the magnitudes and angles of these two polar vectors, and I think self.speed and speed represent the magnitudes, but I don't understand why they're used to calculate the cosine value by np.cos(value - self.speed) (instead of something represents the angle). By the way, I don't quite understand the way you simulate inertia, from my physics knowledge, it may be necessary to use some variables to represent the 'acceleration' or 'derivative' which specifies how fast the speed changes, am I right ?
Also, I wonder what does "direction of the agent" mean at here and what's the difference between "direction of the agent" and "angle of the velocity vector".
Your timely response will be greatly appreciated.
Hello, this is a really cool project! Would you be up to making a pypi release so that people can install via pip install gym-hybrid? It pins the version which will also help people reproduce results in the future :D
Hi,
I was trying to run the code in Jupyter Notebook. However, I got an error as AssertionError: Agent's minimum observation value is greater than it's maximum when i run the codes that are inside the test folder. Would it be possible you to suggest me any comments for this error???
Thank you
Hi, I would like to ask that whether you are considering adding test cases on the hybrid env with respect to the reward value? For example, test whether the reward value is correct in some special states (like moving towards the goal, or moving away from the goal or terminal states). I think it would greatly improve the robustness of the environment. 👍
Hi, this is a nice project for hybrid action space, and I see you mentioned PDQN/HPPO in README.md. Do you have some experiment results about these algorithms in this environment. If not, we want to invite you to implement related algorithms and benchmarks in our repo DI-engine together, we will offer corresponding supports for you. Do you have will to construct a hybrid action space RL benchmark? Other comments are also welcome.
Some algorithms such as Q-PAMDP needs to know the exact shape of all the action spaces. It would be nice to be able to implement an action space that can give this information. The issue is that in this environment, BREAK has no dimension, it is therefore not possible to copy the technique from https://github.com/cycraig/gym-platform
Need to investigate possible solutions. One may be to give a dummy low and high such as 0 and 0. However, this may break some reinforcement learning algorithms to give a 0 range
import numpy as np
from gym import spaces
ACCELERATE = 0
TURN = 1
BREAK = 2
action_id_to_domain = {
ACCELERATE: {'low': [0.], 'high': [1.]},
TURN: {'low': [-1.], 'high': [1.]},
BREAK: {'low': [], 'high': []},
}
action_space = spaces.Tuple(
(
spaces.Discrete(len(action_id_to_domain)),
spaces.Tuple(
tuple(
spaces.Box(low=np.array(d['low']), high=np.array(d['high']), dtype=np.float32)
for _, d in sorted(action_id_to_domain.items())
)
)
)
)
Hi,
I am trying to define interval in between continuous action space as self.action_space = Tuple((Discrete(2), Box(-10, 10, (2,)))), in this parameterized action space. could u please tell me how to define in your gym- environment?
parameters_min = np.array([0, -1])
parameters_max = np.array([1, +1])
self.action_space = spaces.Tuple((spaces.Discrete(3),
spaces.Box(parameters_min, parameters_max)))
I defined as
self.action_space = spaces.Tuple((spaces.Discrete(3),spaces.Box(parameters_min, parameters_max, shape=(0.1, 0.1))))
but got the error as low shape doesn’t match provided shape
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.