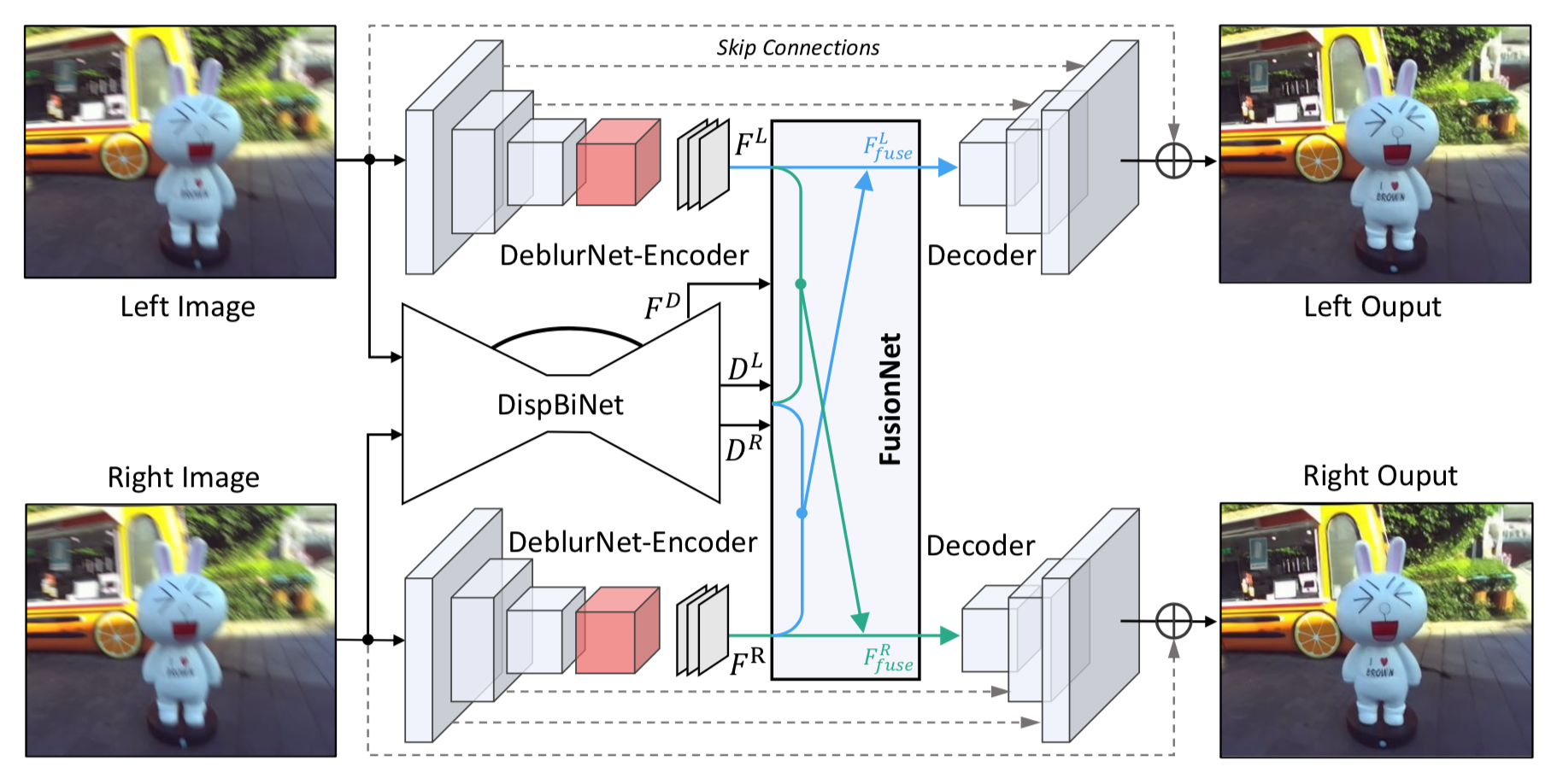
Code repo for the paper "DAVANet: Stereo Deblurring with View Aggregation" (CVPR'19, Oral). [Paper] [Project Page]
Download the dataset (192.5GB, unzipped 202.2GB) from [Data Website].
You could download the pretrained model (34.8MB) of DAVANet from [Here].
(Note that the model does not need to unzip, just load it directly.)
- Linux (tested on Ubuntu 14.04/16.04)
- Python 2.7+
- Pytorch 0.4.1
- easydict
- tensorboardX
- pyexr
pip install -r requirements.txt
Use the following command to train the neural network:
python runner.py
--phase 'train'\
--data [dataset path]\
--out [output path]
Use the following command to test the neural network:
python runner.py \
--phase 'test'\
--weights './ckpt/best-ckpt.pth.tar'\
--data [dataset path]\
--out [output path]
Use the following command to resume training the neural network:
python runner.py
--phase 'resume'\
--weights './ckpt/best-ckpt.pth.tar'\
--data [dataset path]\
--out [output path]
You can also use the following simple command, with changing the settings in config.py:
python runner.py

If you find DAVANet, or Stereo Blur Dataset useful in your research, please consider citing:
@inproceedings{zhou2019davanet,
title={{DAVANet}: Stereo Deblurring with View Aggregation},
author={Zhou, Shangchen and Zhang, Jiawei and Zuo, Wangmeng and Xie, Haozhe and Pan, Jinshan and Ren, Jimmy},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
year={2019}
}
We are glad to hear if you have any suggestions and questions.
Please send email to [email protected]
[1] Zhe Hu, Li Xu, and Ming-Hsuan Yang. Joint depth estimation and camera shake removal from single blurry image. In CVPR, 2014.
[2] Seungjun Nah, Tae Hyun Kim, and Kyoung Mu Lee. Deep multi-scale convolutional neural network for dynamic scene deblurring. In CVPR, 2017.
[3] Orest Kupyn, Volodymyr Budzan, Mykola Mykhailych, Dmytro Mishkin, and Jiri Matas. Deblurgan: Blind motion deblurring using conditional adversarial networks. In CVPR, 2018.
[4] Jiawei Zhang, Jinshan Pan, Jimmy Ren, Yibing Song, Lin- chao Bao, Rynson WH Lau, and Ming-Hsuan Yang. Dynamic scene deblurring using spatially variant recurrent neural networks. In CVPR, 2018.
[5] Xin Tao, Hongyun Gao, Xiaoyong Shen, Jue Wang, and Jiaya Jia. Scale-recurrent network for deep image deblurring. In CVPR, 2018.
This project is open sourced under MIT license.












































































































