Pynq-Z2 board, PC, USB-A to micro USB cable.
Tested with:
Ubuntu 20.04.2 LTS (host PC)Vivado / Vitis / Vitis HLS 2021.1(with cable drivers and board files installed)- Place board_files folder in .../Xilinx/Vivado/2021.1/data/boards/ directory to install pynq-z2 board files.
- Make sure Zynq 7000 series compatibility was ticked during installation. Else, in Vivado, go to Help->Add Design Tools or Devices and add it.
Tensorflow 2.6.0OpenCV 4.2.0Python 3.8.10

- Customize network parameters in
mnist_net.py. Then run the script to train network and output its weights. - Create HLS project with template C++ files from this repository (see steps further down in this readme). Customize parameters to fit network as defined in step 1 above. Then export RTL to obtain IP core.
- Create Vivado project with files from this repository (see steps further down in this readme). Customize modules to fit network and IP as defined in steps above. Then generate bitstream and export hardware (with bitstream).
- Create Vitis platform project and application project (see steps further down in this readme). Customize code to fit hardware as defined in the above steps. Build project and deploy on the Pynq-Z2 board.
- Use
uart_test_nn.pyto randomly choose a test image and send it to the Pynq-Z2 board via UART (see steps further down in this readme). Observe LED[0:3], which displays the network output in binary, and check against the test image label - hopefully they are the same.
- Clone repository:
git clone https://github.com/nhma20/FPGA_AI.git - Download and unpack the dataset: https://nextcloud.sdu.dk/index.php/s/wZg4FLSxgiigJTL
1) Train network and extract weights with mnist_net.py
- Loads dataset, defines, trains and tests simple network, extracts weights.
- Edit to customize network for performance and/or accuracy (
dims,model,epochsetc) - Run with :
python3 mnist_net.py -dataset_dir <PATH_TO_DATASET>e.g.python3 mnist_net.py -dataset_dir /home/nm/Downloads/MNIST_Dataset_JPG/ - Prints information regarding the network such as training progress, an overview of the network structure, test accuracy, and a random test inference result at the end.
- Should generate several .txt files containing the weights of the network.
- The (default) implemented network is the following:

- Open HLS -> Create Project -> Name and Location -> Next
- Design files: Add files ->
matmul.cppandmatmul.hpp-> Top function -> nn_inference -> Next - TestBench files: Add files ->
matmul_tb.cpp-> Next - Select Configuration: Part -> Boards -> pynq-z2 -> Finish
- (edit files to fit any network customization)
- Replace template weights with new weights generated from network training script in step 1. All weights (by default layer2_weights, layer2_weights, and layer3_weights arrays) are stored in
matmul.hppfile. - Run C Simulation to verify design with testbench file. Output should match labels of input arrays (pixel values of test images) in matmul_tb.cpp.
- Run C Synthesis (choose appropriate clock Period (ns) to match what you want in design) to synthesize design into VHDL/Verilog
- This step outputs the estimated ressource usage, timings, and other relevant information.
- Export RTL to obtain IP that can be imported to Vivado. IP will by default be located in HLS project folder.
-
Open Vivado -> Create Project -> Next -> Name and location, tick create subdirectory -> Next -> RTL Project, untick Do not specify sources -> Next -> Add Directories -> .../FPGA_AI/src/vhdl/ -> Next -> Next -> Under Boards choose pynq-z2 -> Next -> Finish
-
Let Vivado find custom IPs
- Tools -> Settings -> IP -> Repository
- Add folder with new IP (likely HLS project folder)
- Can now add nn_inference to block design with 'Add IP' (Ctrl+i)
-
Create Block Design and add ZYNQ7 Processing System and then Run Block Automation
-
Double click the Zynq module and edit the green IO peripheral fields to only have a tick on UART 0
-
Add Axi BRAM Controller and then Run Block Automation
-
Double click axi_bram_ctrl_0 module and edit Number of BRAM interfaces to 1
-
Add Nn_inference without running block automation
-
From sources, drag in
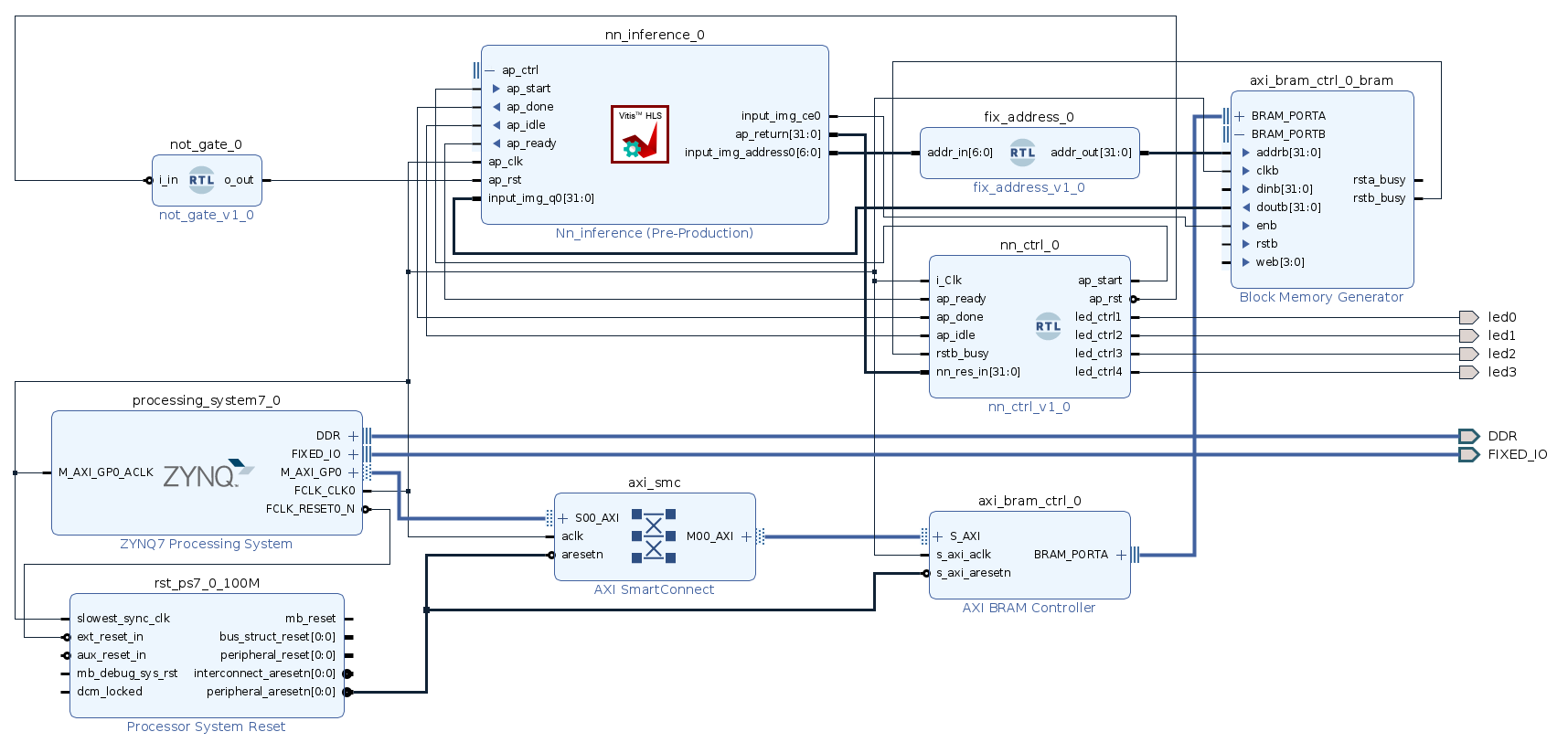
fix_address.vhd,not_gate.vhd, andnn_ctrl.vhdmodules.nn_ctrl.vhd: Connect all ap_* ports except ap_rst to the corresponding port on nn_inference module. Make all 4 led_ctrl* external. Connect nn_res_in to ap_return on nn_inference. Connect rstb_busy to corresponding port on axi_bram_ctrl_0_bram. Connect i_Clk to FCLK_CLK0 on the Zynq7 module.fix_address.vhd: connect addr_in to input_img_address on nn_inference module. If widths do not match, double click on fix_address and edit. Expand BRAM_PORTB on axi_bram_ctrl_0_bram and connect addrb to addr_out on fix_address.not_gate.vhd: Connect i_in to ap_rst on nn_ctrl. Connect o_out to ap_rst on nn_inference module.- nn_inference: Connect ap_clk to FCLK_CLK0 on Zynq7 module. Connect input_img_q0 to doutb on axi_bram_ctrl_0_bram. Connect input_img_c0 to enb on axi_bram_ctrl_0_bram.
- Connect clkb on axi_bram_ctrl_0_bram to FCLK_CLK0.
- Right-click anywhere in the block diagram and regenerate layout and it should look similar to the below image:

-
In sources, right click on design_1.bd (in orange) and click create wrapper and let Vivado manage it.
-
Run Synthesis (may take a while) and open Synthesized Design. In the top right corner select I/O Planning. At the bottom, select the I/O Ports window and expand Scalar ports (4).
-
Set the I/O Std of the 4 led_ctrl* ports to LVCMOS33. From led_ctrl1 to led_ctrl4, assign the following package pins: R14, P14, N16, M14. Ctrl+s to save.
-
Go to the block diagram, save, validate design, and then Generate Bitstream (may also take a while).
-
Finally, go to File -> Export Hardware -> Next -> Include bitstream -> Next -> Location -> Next -> Finish
- Open Vitis -> Create platform project -> name -> Next -> Browse to where you saved the exported hardware -> Finish.
- File -> New -> Application Project -> Next -> Select your platform project -> name -> Next -> Next -> Select Hello World -> Finish.
- Insert the C code from the
helloworld.cfile in this repository. Make sure NUM_INPUTS matches the parameters of the network and hardware. - Save and right-click application project to build it.
- Right-click application project and Run As -> Launch Hardware to deploy on Pynq-Z2 board. Some of the 4 LED[0:3] should light up.
- Find port number of Pynq-Z2 board (e.g.
ls /dev/and look for ttyUSB*) - Run
uart_test_nn.pywith port as argument, e.g.:python3 uart_test_nn.py -port /dev/ttyUSB1 - The script sends a random test image from the dataset to the Pynq board over UART and outputs the corresponding label. Hopefully LED[0:3] lights up in the same binary number as the test image label.


The finished tutorial system is illustrated in the image below:

From the host PC test images are sent to the PYNQ-Z2 board via UART. The baremetal software application acts as an interface between host PC and hardware and send the test image to the hardware inference module through BRAM. The inference result is displayed via the onboard LEDs and sent back through the software application to the host PC.
- Unroll loops with:
#pragma HLS UNROLL. Append factor=X if HLS should not unroll fully but with factor X.- Reduces latency ~10x
- May introduce negative slack which would require longer clock periods (lower clock frequency). Can use clocking wizard to hit desired target.
- Perhaps possible to save cycles by using parallel IO instead of sequential memory reads.
- Fully parallel IO with:
#pragma HLS ARRAY_PARTITION dim=1 type=complete variable=input_img - Default is simple memory interace if no pragma specified
- Fully parallel IO with:

- Excellent HLS walkthrough (with occasional bad audio):
- Xilinx HLS User Guide (v2021.1)

- Send the network result back to the host PC through UART, perhaps read and print the result with the uart_nn_test script.
- Evaluate the network inference time in hardware and send it to host PC via UART. Have a look at the HLS ap_ctrl_hs interface image above for inspiration on which signals from the nn_inference module might be interesting.
- Change network input image resolution. At least the following needs attention: network training script (
dims), HLS (n_inputs), Vivado (fix_address), Vitis (NUM_INPUTS), network testing script (dims) - possibly more. - Quantize network to reduce inference time - change input data type to 16 or 8-bit datatype instead of 32-bit float. The following links may be helpful:
- Customize network parameters to improve accuracy and/or inference time. Some interesting parameters: input image resolution, number of layers, number of neurons in each layer, number of training epochs etc.
- Optimize HLS implementation to decrease latency using directives/#pragmas to e.g. unroll loops.
The src directory contains the source files of this repository divided into the following subdirectories:
- hls
- C++ code to generate simple neural network IP with high-level synthesis.
- python
- Python scripts to train a simple neural network and extract its weights, and communicate with generated neural network inference hardware module.
- vhdl
- VHDL code files to control the generated neural network inference hardware module.
- vitis
- Baremetal C code application to interface between host PC and generated neural network inference hardware module.
Branches (4_layer_15x15, send_nn_res_uart, sign_mnist, ap_fixed, and benchmark) contain slightly different (and somewhat experimental) versions of the project, i.e. a deeper neural network with higher input image resolution, a version that sends the inference result back to the host PC over UART, a neural network to detect hand gestures, an optimized HLS implementation using fixed point datatypes, and benchmarks of FPGA and software inference.
Created by Nicolaj Malle, PhD fellow at University of Southern Denmark > UAS Center > DIII
Contact: [email protected]
If you use this work, please cite: N. Malle and E. Ebeid, "Open-Source Educational Platform for FPGA Accelerated AI in Robotics," 2022 8th International Conference on Mechatronics and Robotics Engineering (ICMRE), 2022, pp. 112-115, doi: 10.1109/ICMRE54455.2022.9734102.








