Systém pro sběr dat o prostředí a jeho detekci za účelem rozpoznání umožňující změnu chování mobilního robotu.
Tato práce byla podpořena Ministerstvem školství mládeže a tělovýchovy České republiky, projekt číslo LTARF18017.
Environment detection system for mobile robot. The goal is to collect data to recognize the environment and adapt mobile robot behaviour.
Tested on Ubuntu 18.04 LTS with ROS Melodic


no significant changes in the fork yet, better to use original ANYbotics version
https://github.com/neduchal/grid_map or https://github.com/ANYbotics/grid_map
dependencies of grid map library
sudo apt-get install ros-melodic-octomapros-melodic-octomap-msgs ros-melodic-costmap-2d
/map([nav_mags/OccupancyGrid])
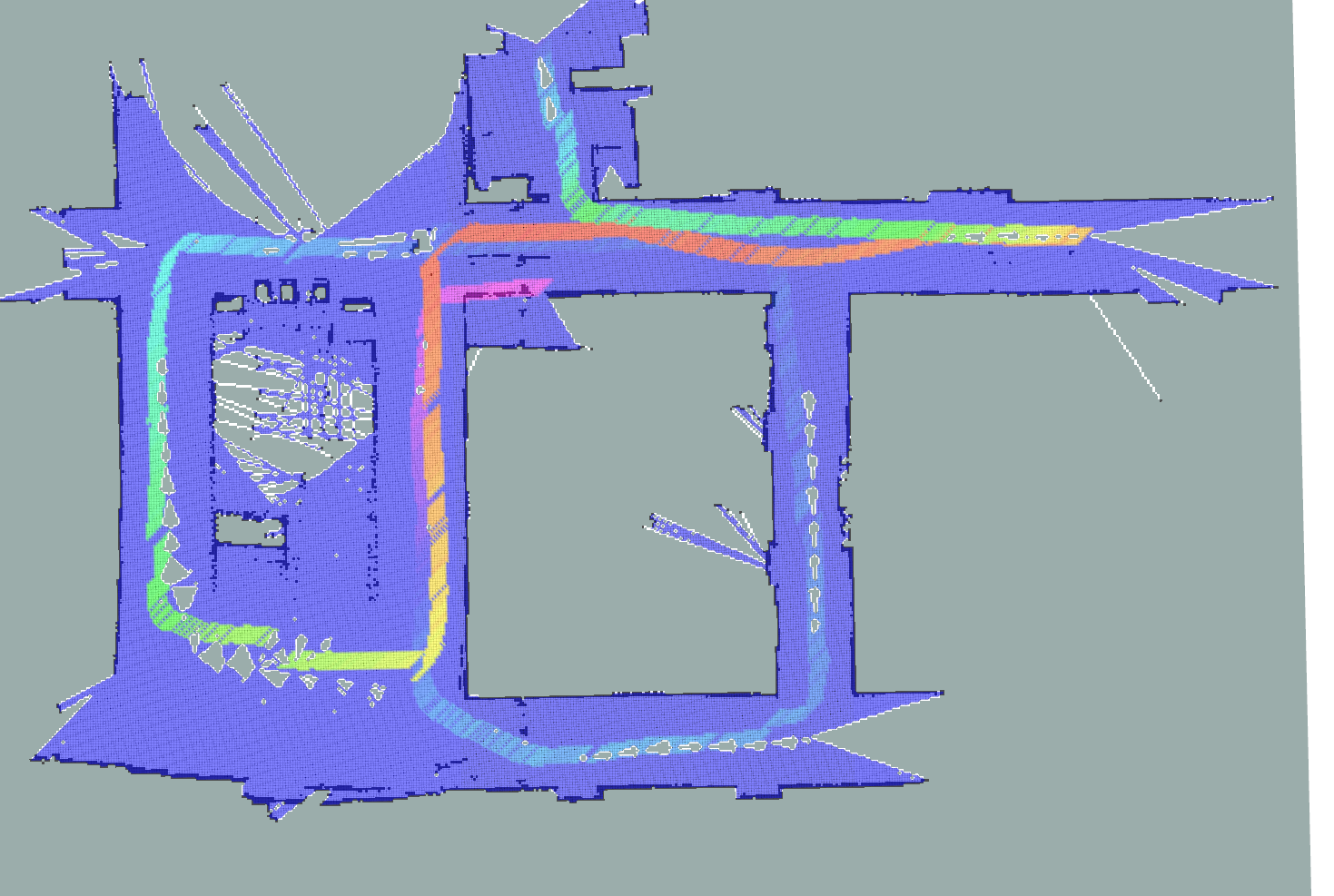
Map of the environment generated by Simultaneous Localization And Mapping (SLAM) algorithm
- The transformation between
/mapframe and/base_linkframe have to be set in order to determine pose in the map.
There is an example launch file used for testing multiple sensors.
roslaunch env_detection_core test.launch
To cite this project in your research:
@article{neduchal2019environment,
title={Environment detection system for localization and mapping purposes},
author={Neduchal, P and Bure{\v{s}}, L and {\v{Z}}elezn{\`y}, M},
journal={IFAC-PapersOnLine},
volume={52},
number={27},
pages={323--328},
year={2019},
publisher={Elsevier}
}
This work was supported by the Ministry of Education of the Czech Republic, project No. LTARF18017.

