- Hubungkan kabel USB ke mikrokontroler
- Hubungkan konektor gripper dari sirkuit ke alat lengan robot
- Hubungkan konektor Servo Dynamixel dengan kabel pada sirkuit
- Hubungkan 2 power supply 12V ke alat lengan robot
- Hubungkan kabel USB ke komputer
- Buka file aplikasi yang berformat .mlapp
- Aplikasi MATLAB akan terbuka, tunggu hingga jendela aplikasi Kalkulasi LQR muncul
- Atur Nilai Parameter tabel matriks Q dan R sesuai keinginan
- Klik tombol Kalkulasi untuk melakukan kalkulasi nilai gain
- Setelah kalkulasi selesai, tabel matriks K (gain) akan terisi otomatis
- Untuk menyalin seluruh nilai dari satu baris, klik salah satu nilai pada baris yang akan disalin, lalu tekan Ctrl + C (Windows) atau Command-C (MacOS)
- Unduh aplikasi melalui Link ini
- Ekstrak arsip tersebut
- Buka dan jalankan aplikasi RobotArmControlApp.exe
- Unduh aplikasi melalui Link ini
- Ekstrak arsip tersebut
- Buka terminal / command prompt / powershell
- Jalankan perintah berikut
pip install -r requirements.txt
- Pastikan semua library berhasil terinstal
- Klik dua kali pada file RobotArmControlApp.py atau pada terminal / command prompt / powershell jalankan perintah berikut
python RobotArmControlApp.py
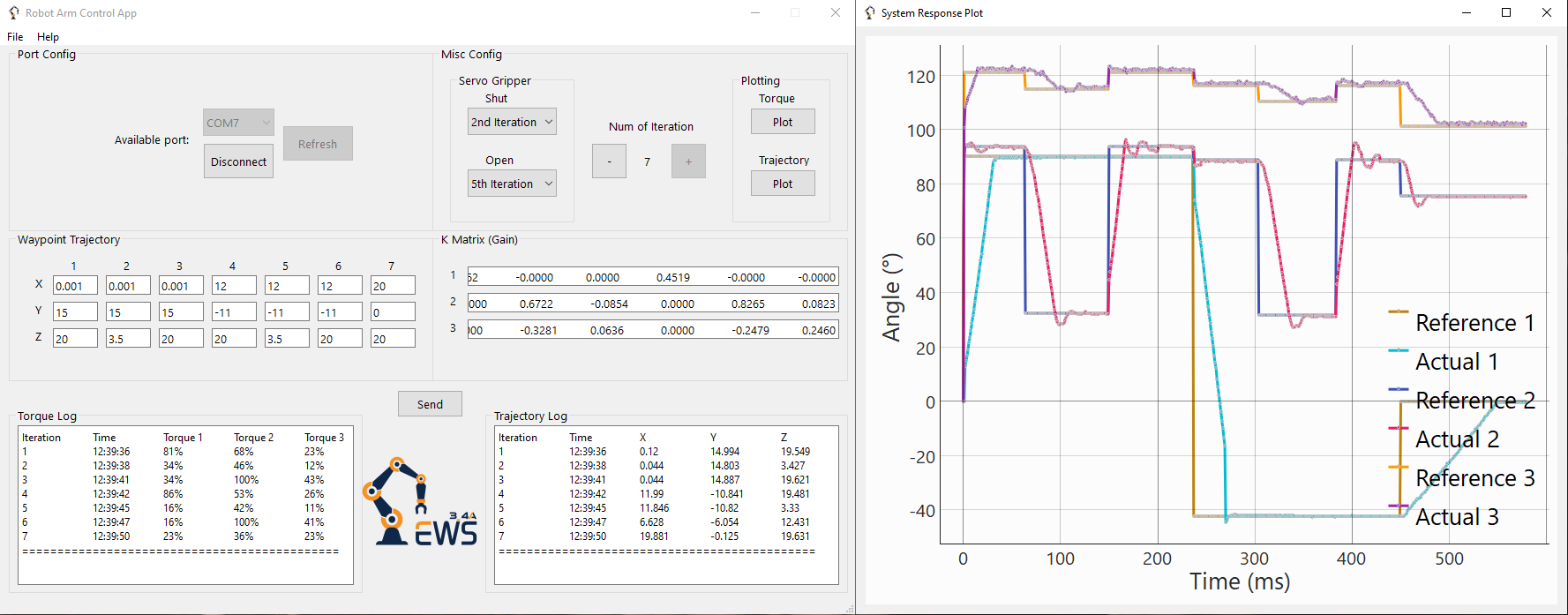
- Jendela aplikasi akan muncul
- Pilih port, jika mikrokontroler belum dihubungkan saat aplikasi berjalan, hubungkan mikrokontroler lalu tekan tombol Refresh untuk memindai ulang port yang terdeteksi pada komputer
- Setelah memilih port, klik tombol Connect untuk mencoba terhubung dengan mikrokontroler
- Jendela dialog berhasil terhubung akan muncul jika sukses terhubung, klik OK
- Jendela akan menjadi lebih luas dan memunculkan semua menu aplikasi
- Membuka data konfigurasi yang tersimpan (opsional) tekan kombinasi tombol Ctrl + O atau pada menu bar File pilih Open config
- Tentukan jumlah iterasi
- Tentukan koordinat waypoint trajectory sesuai jumlah iterasi
- Mengisi dengan menempel dengan Ctrl+V (Windows) atau Command-V (MacOS) nilai matriks K (gain) yang diperoleh dari hasil kalkulasi aplikasi Kalkulasi LQR
- Menentukan iterasi untuk membuka tutup gripper atau tidak menggunakan gripper
- Menyimpan data konfigurasi (opsional) tekan kombinasi tombol Ctrl + S atau pada menu bar File pilih Save config
- Klik tombol Send untuk mengirimkan data ke mikrokontroler
- Mikrokontroler akan mengirimkan data output torsi dan trajectory dari tiap aktuator joint sesuai dengan jumlah iterasi
- Jendela System Response Plot yang akan menampilkan plot real-time dari respon sistem
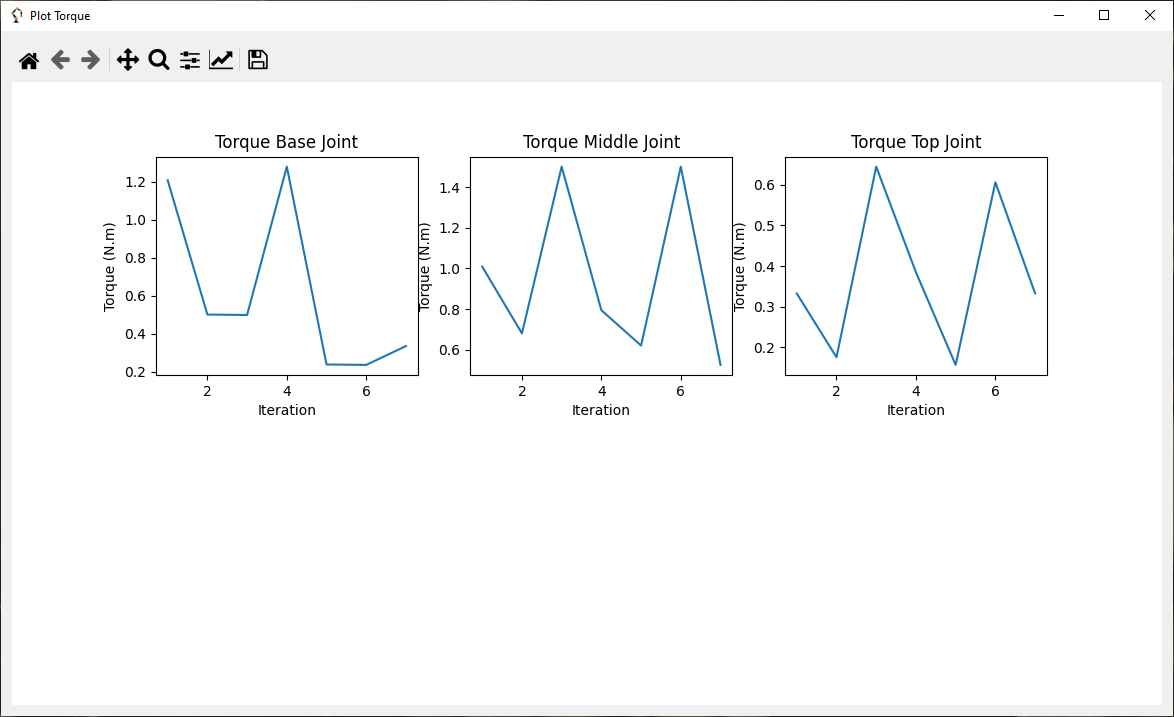
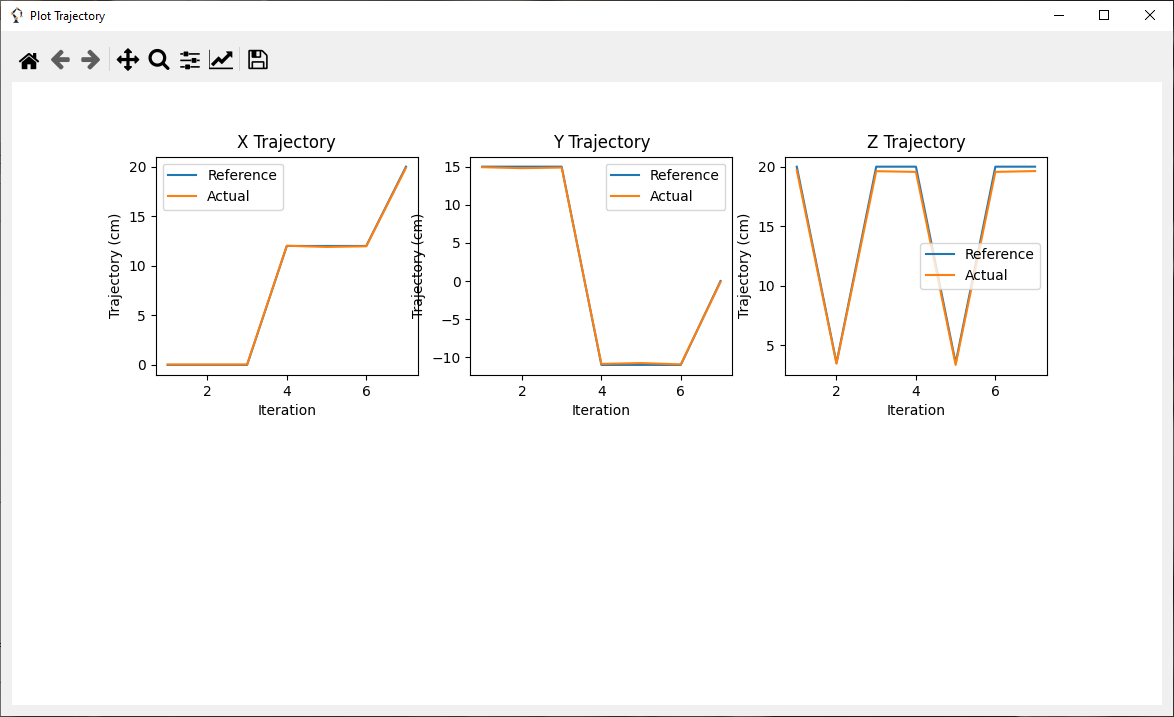
- Setelah robot menyelesaikan seluruh iterasi, tombol Plot dapat digunakan untuk menampilkan plot grafik torsi dari tiap servo atau perbadingan trajectory referensi dengan aktual
- Untuk menyimpan gambar plot respon sistem, klik kanan pada grafik lalu pilih export
- Untuk menyimpan log trajectory dan torsi tekan kombinasi tombol Ctrl + Shift + S atau pada menu bar File pilih Save log