The goal of this project is to identify lane lines on the road and draw them on the test images and videos. I'll be explaining how I managed to do that using the pipeline I created that employed techniques I learned in this course and others that I learned through the course of this project.
- Color Selection
- Gray Scaling and Smooting
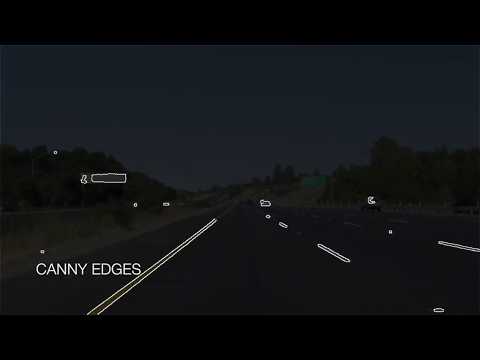
- Canny Edge Detection
- Region of interest
- Hough Transform
- Extrapolating Lane lines
Throughout the course of the project I will be showing the transformations on this set of test images:

I went ahead and borrowed four images form the challenge video to include it in the test images as seen in the last four images. I did that cause I wanted to test on images that have more noise like shade and different lighting.
Here I applied multiple strategies to get the white and yellow lane lines from the test images.
I first tried to use RGB filtering by applying a white and yellow masks on the image and here were the results:

While this gives good results for some images it lacks to detect the lines for others like the images at the bottom which are mainly in the shade.
So instead of using the default RGB color space which didn't fit my data I went and explored two other color spaces:
- HSV which stands for Hue, Saturation, and Value
- HSL which stands for Hue, Saturation, and Lightness
I used OpenCV's cv2.cvtColor() method to convert to each of the color spaces.
Here are the results for the HSV color space:

The HSV images clearly highlights the lane lines that are in the shaded area in the bottom 4 images something that our RGB filters lacked to accomplish;However, as you can see we lost all the lane lines in the top two images, the white lines aren't really visible especially the white dotted lines.
Then I checkout the HSL images:

All lane lines are visible even the ones in the shade which is what was missing from the RGB images after filtering, so I ended up choosing the HSL images as the color space encompassed the best of both worlds.
Then I used a white/yellow mask to isolate the white and yellow colors in the image as show below:

After that I applies grayscaling on the images as shown here:

Then I applied smoothing the grayscaled image using Gaussian Blur before I applied Canny edge detection, I found that a filter size of 11 does a nice job on the sample images. Though Canny Edge Detection applies smoothing internally, we can't change the filter size so prior smoothing is recommended as a good practice.
Here are the results of the images after smoothing:

Then I applied Canny edge detection with the thresholds of 50 to 150 which is 1:3 ratio as recommended by Canny, and here are the results:

After selecting the colors, gray scaling, smoothing, and getting the image's Canny edges I removed all the unimportant parts of the image like other lane lines, trees, sky, etc. to focus on the road ahead. I did this by applying a mask to only include pixels within a region of interest, and here is the results after applying it on the Canny images:

As you can see I got a good outlines of the lane lines, the region of interest is as follows:
- Bottom is set to the image bottom
- Top is set to 60% of the image hight(just below the image center) which I think is a good estimate for the horizon
- Its width spans the image with a little padding 5% to eachside and narrows towards the top of the image with a width of 10%
This gives a good representation of a road with its lane lines narrowing toward the horizon.
I then proceeded to apply the Hough transform which resulted in the lines below:

This result is pretty good for it show clear lines where the lane lines are, here are the lines drawn on top of the real images:

The lane lines are clearly identified and a red line is drawn over the line segments connecting most dashed lines segments; however, we can still see the gaps in some of images where the lines are not connected to the full extent of the lane lines.
I altered the hough_lines to return a list of lines along with the image with lines drawn on them, I did this because these lines will be divided into right and left lane lines, averaged, and weighted to produce the best fit for the lane lines.
After finding the lane lines and drawing them I extrapolated (extended) the lane lines to have two continues lane lines from the bottom of the image (the car's body) and towards the horizon (60% of the image). I achieve this by:
I wrote a method average_slope_yintercept that returns two lane lines (slope, y-intercept) by dividing our lane lines as left and right using their slopes negative slope means left lane and positive means right lane (inversed), then I averaged each lane line slopes and y-intercepts to get a single line for each lane. Also I used each line length as a weight to give more consideration to lines that are longer in length.
Then I made lines for the averaged lane lines from their slopes and y-intercepts using the
straight line equation y = mx + b
I decided to make draw_lane_lines() method to handle drawing the extrapolated lane lines instead of altering draw_lines() method for better code organization, so basically draw_lane_lines() is my modified draw_lines().
Here are the results of the draw_lane_lines() "darw_line()" method:

Actually still one more thing. After applying the pipeline on the first video solidWhiteRight the result seemed ok though the lines were a little jittery.
However, when applying it to the second video solidYellowLeft i noticed that at a certain second in the video the lane lines crossed each other for as you can see here:

Since videos mainly play 60 frames per second and each frame is an image, therefore I averaged the frames' lines to have a smoother and more consistent lane lines that didn't jitter and cross each other due to a couple of faulty frames. I chose to average across a 30 frame sample, this number gave me the most stable results.
So I made a class called LaneLineFinder with:
SAMPLE_FRAMESas a constant number of frames to average acrossright_lane_linesandleft_lane_linesare twodeque(queue in python) variables of lengthSAMPLE_FRAMESaverage_line_samplinggets the average of the previousSAMPLE_FRAMESframes using numpynp.meanmethodprocess_imagewhich executes the pipeline
You can checkout the full video processed videos in the links provided below:
Here are so shortcoming that I need to address in the coming weeks as I advance through the course:
- Identifying curves and curving my extrapolated lines accordingly.
- It also seems that the line quality is tested when the car is driving at higher speeds.
- I need a more robust and dynamic way of identifying the road's horizon rather than just including 60% of the image hight.
- I don't know what will be the case if there is a car close and in the same lane us our line of site, also what will be the case if the car is either white or yellow?
- Will this algorithm work in low light situation?
- Identifying the horizon using a color filter as I did with the lane lines using the tarmac, or asphalt color.
- Ignoring horizontal lines to make the pipeline immune to close cars in the same lane.
- Using a different detection method that deals with higher order polynomial to account for curved lines


