js-aruco is a port to JavaScript of the ArUco library.
ArUco is a minimal library for Augmented Reality applications based on OpenCv.
100% JavaScript (see details bellow):
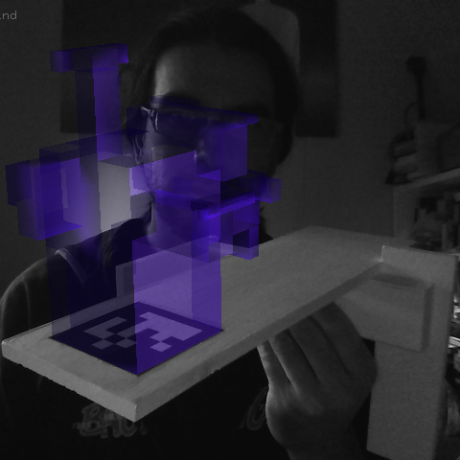
3D Pose Estimation:
Visual Debugging:
A 7x7 grid with an external unused black border. Internal 5x5 cells contains id information.
Each row must follow any of the following patterns:
white - black - black - black - black
white - black - white - white - white
black - white - black - black - white
black - white - white - white - black
Example:

Create an AR.Detector object:
var detector = new AR.Detector();
Call detect function:
var markers = detector.detect(imageData);
markers result will be an array of AR.Marker objects with detected markers.
AR.Marker objects have two properties:
id: Marker id.corners: 2D marker corners.
imageData argument must be a valid ImageData canvas object.
var canvas = document.getElementById("canvas");
var context = canvas.getContext("2d");
var imageData = context.getImageData(0, 0, width, height);
Create an POS.Posit object:
var posit = new POS.Posit(modelSize, canvas.width);
modelSize argument must be the real marker size (millimeters).
Call pose function:
var pose = posit.pose(corners);
corners must be centered on canvas:
var corners = marker.corners;
for (var i = 0; i < corners.length; ++ i){
var corner = corners[i];
corner.x = corner.x - (canvas.width / 2);
corner.y = (canvas.height / 2) - corner.y;
}
pose result will be a POS.Pose object with two estimated pose (if any):
bestError: Error of the best estimated pose.bestRotation: 3x3 rotation matrix of the best estimated pose.bestTranslation: Translation vector of the best estimated pose.alternativeError: Error of the alternative estimated pose.alternativeRotation: 3x3 rotation matrix of the alternative estimated pose.alternativeTranslation: Translation vector of the alternative estimated pose.
Note: POS namespace can be taken from posit1.js or posit2.js.
It uses Flashcam, a minimal Flash library to capture video.