yolov3的前向推理

- pallete - 颜色
[convolutional] # conv + [bn] + [activation]
batch_normalize=1
filters=64
size=3
stride=2
pad=1
activation=leaky
[shortcut]
from=-3 # 前三层
activation=linear
[upsample] # 双线性上采样
stride=2
[route] # 它将输出由该值索引的图层的特征图
layers = -4 #该层将从Route层向后从第4层输出特征图。
[route]
layers = -1, 61 # concatenated along the depth dimension. from -1 and 61 layer
[yolo] # 输出
mask = 0,1,2
anchors = 10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326
classes=80
num=9
jitter=.3
ignore_thresh = .5
truth_thresh = 1
random=1
[net] # 网络训练信息,在推理时不用
# Testing
batch=1
subdivisions=1
# Training
# batch=64
# subdivisions=16
width= 320
height = 320
channels=3
momentum=0.9
decay=0.0005
angle=0
saturation = 1.5
exposure = 1.5
hue=.1
- 过滤低于阈值的bbox的obj score
- 使用nms过滤相邻的bbox
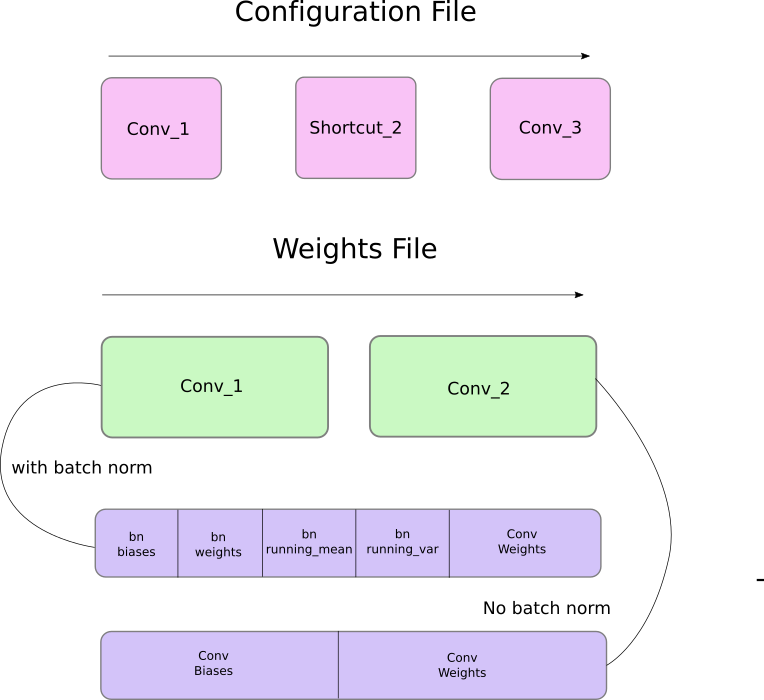
权重只是存储为浮点数,没有任何东西可以指导我们它们属于哪一层。
权重仅属于两种类型的层,即批处理规范层或卷积层。
当batcn norm出现在convolutional块中时,就没有偏差。但是,当没有batch norm时,必须从文件中读取bias“权重”。
权重文件的前160个字节存储5个int32值,这些值构成文件的头。
https://blog.paperspace.com/how-to-implement-a-yolo-object-detector-in-pytorch/

