clone this in SimHub\PluginSdk\:
with Arduino STM32 Plue pill sketch
and SimHub Custom Serial profile
for scooter motor PWM torque control:
...these employ an evolved Fake8 SimHUb plugin to send 8-bit commands
to an Arduino sketch.
Several Sim racing harness tensioners use either stepper motors or hobby/robot servo motors,
either choice being IMO suboptimal:
- gears generate noise and kill responsiveness
- neither directly applies tension; they instead simply move some amount.
A few tensioners already use PWM control of DC motors,
where PWM % directly relates to stall torque (tension).
A stalled electric motor generates no back EMF,
consequently needing much lower than rated motor Voltage.
Electric scooter motors
seemingly deliver appropriate torque for direct drive harness tensioning,
as discussed here.
Lebois Racing also has a
scooter motor tensioner for SimHub
and video
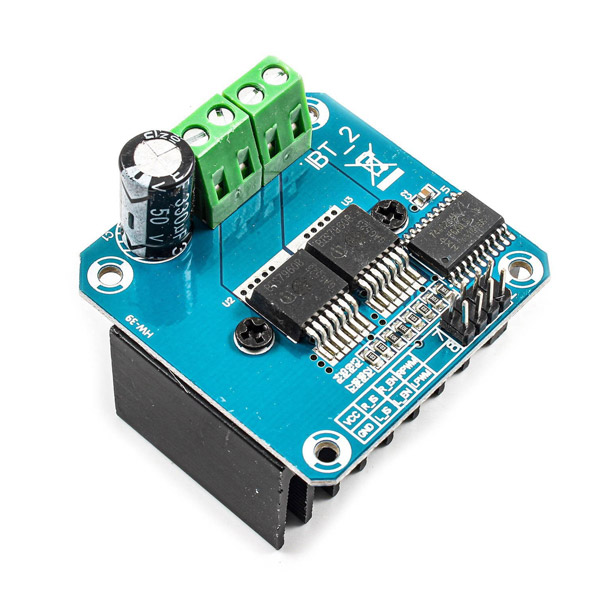
... driven by BTS7960 43A Motor Drivers:

Since scooter motors are NOT designed
for use as traction motors,
(data for 350W motor; rescale for 250W (5/7))

... some information is lacking to use mostly stalled:
- What PWM frequency minimizes coil whine while not compromising torque control?
- What range of PWM values is safe and useful?
- How responsively can tension (motor torque) slew?
Substantial changes will involve appreciable shaft rotation, generating back EMF. - Is predistortion/preemphasis wanted for more responsive torque application and release?
- If so, how much and for how long?
- using IIR filter, fuzzy logic or PID?
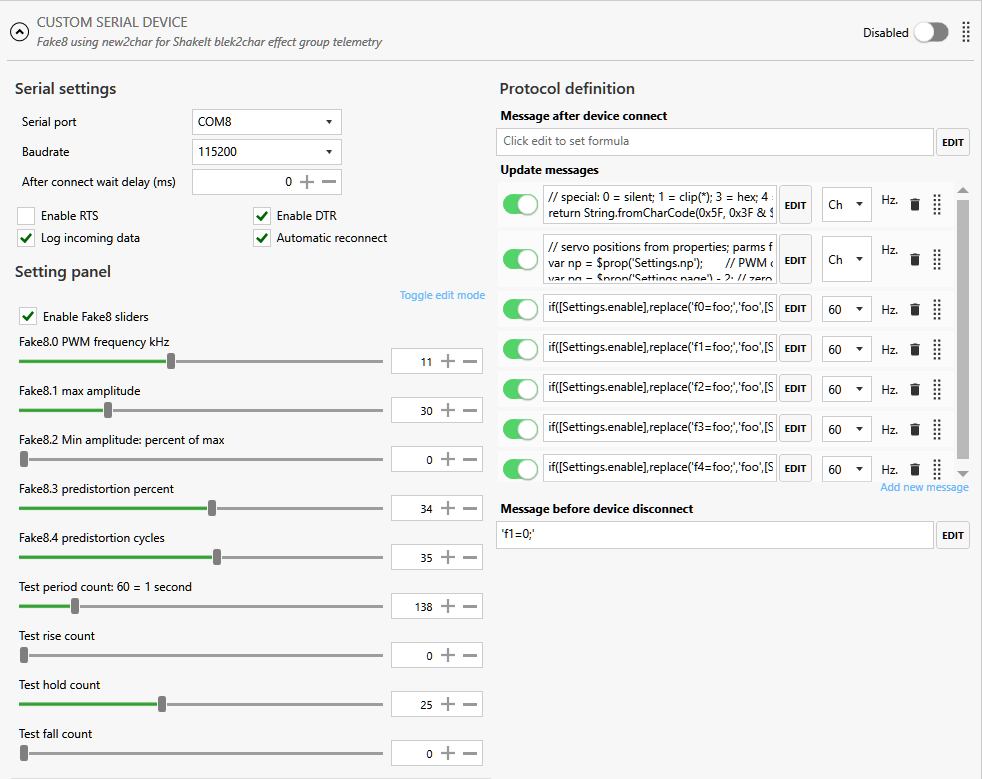
Testing will employ this waveform, sampled at SimHub 60Hz rate:

At least 9 controls are wanted for testing:
- test period (60 = 1 second)
- rise time (0 to period/3)
- hold time (0 to period/3)
- fall time (0 to period/3)
- max signal magnitude
- min signal magniitude
Up to 5 signals to Blue Pill:
-
Testing sample values driving PWM %
-
PWM frequency ( ~ 20kHz?)
-
predistortion amplitude (% of sample value changes) to compensate slew rate limits:


-
predistortion duration (Blue Pill Arduino loop() cycle count)
worst case, scooter motor may want brief negative predistortion to relax tension,
consuming both sides of an "H" PWM driver per motor:
-
optional reference measurements to echo, along with sample values,
for capture from SimHub "Incoming serial data" e.g. to plot, where reference tension measurements may be captured from a sim brake pedal load cell.

This wants multi-byte control for SimHub Custom serial devices to handle that many variables.
Fake8 SimHub plugin drives PWM_FullConfiguration
16 Mar 2023 A derivative plugin will add test waveform by Bresenham Line Generation, minimizing discontinuity:
- changes increasing amplitude will start in ramp-up section
- changes decreasing amplitude start in ramp-down section
- receipt of a control change from Custom Serial profile will cause
Parse()to set aChangeflag true == Changewill cause interval and slope recalculations at the nextDataUpdate()invocation.
20 Mar 2023: begin scheming for Bresenham PWM modulation
21 Mar 2023: copied source files:
- .gitignore
- Fake7.cs
- Fake8.cs
- Fake8.csproj
- NCalcScripts/F8.ini
- Bresenham.md
New, to modulate Arduino PWM: - Test.cs compiled, but not tested
Visual Studio: project.assets.json not found
- cmd.exe shell:
> dotnet restore - VS 2019 will not debug builds until a .cs file is displayed.
- stepping thru code seems (mostly) OK...
- many Custom Serial setting changes get ignored while Test runs
- Custom Serial messages eventually get handled, but it may take minutes.
- unplugging Arduino USB posts error, then Custom Serial messages get handled
- posted Arduino I/O operation abort message to Custom Serial...
- post in
AndroidDataReceived()exception hung SimHub inwhile(ongoing) ReadExisting()loop - post in
Recover(), duringDataUpdate(), is OK...
- post in
- speculation: extra (serial port receive) threads running in plugin confound SimHub
- adding
Thread.Sleep(8)inReadExisting()loops did not help. - alternative: read once per invocation on main thread, buffer until message end characters...?
- adding
- Moving
Arduino.ReadExisting()to theDataUpdate()thread provokesCustomSerial.Write()timeouts - also changing
CustomSerial.ReadExisting()to that thread made both serial ports robust.
For debugging, Test will execute a single extended cycle,
- starting count at
climb+hold+fall, continuing thruperiodandclimband ending at the nextperiod - this will e.g. simplify capturing results for gnuplot
- prototyping preemphasis filtering will be faster and easier in Test class of the plugin than in Arduino.
28 Mar 2023 IIR high-pass filter
- two controls (amplitude, time constant) by 3 sliders: rational values
<= 1.- one for positive integer numerator
- one for each denominator non-negative integer added to numerator
